Door mijn onvoorzichtige gedrag heb ik de verwarmings Mosfet van mijn Voron 2.4’s Stealthburner toolhead PCB beschadigd.
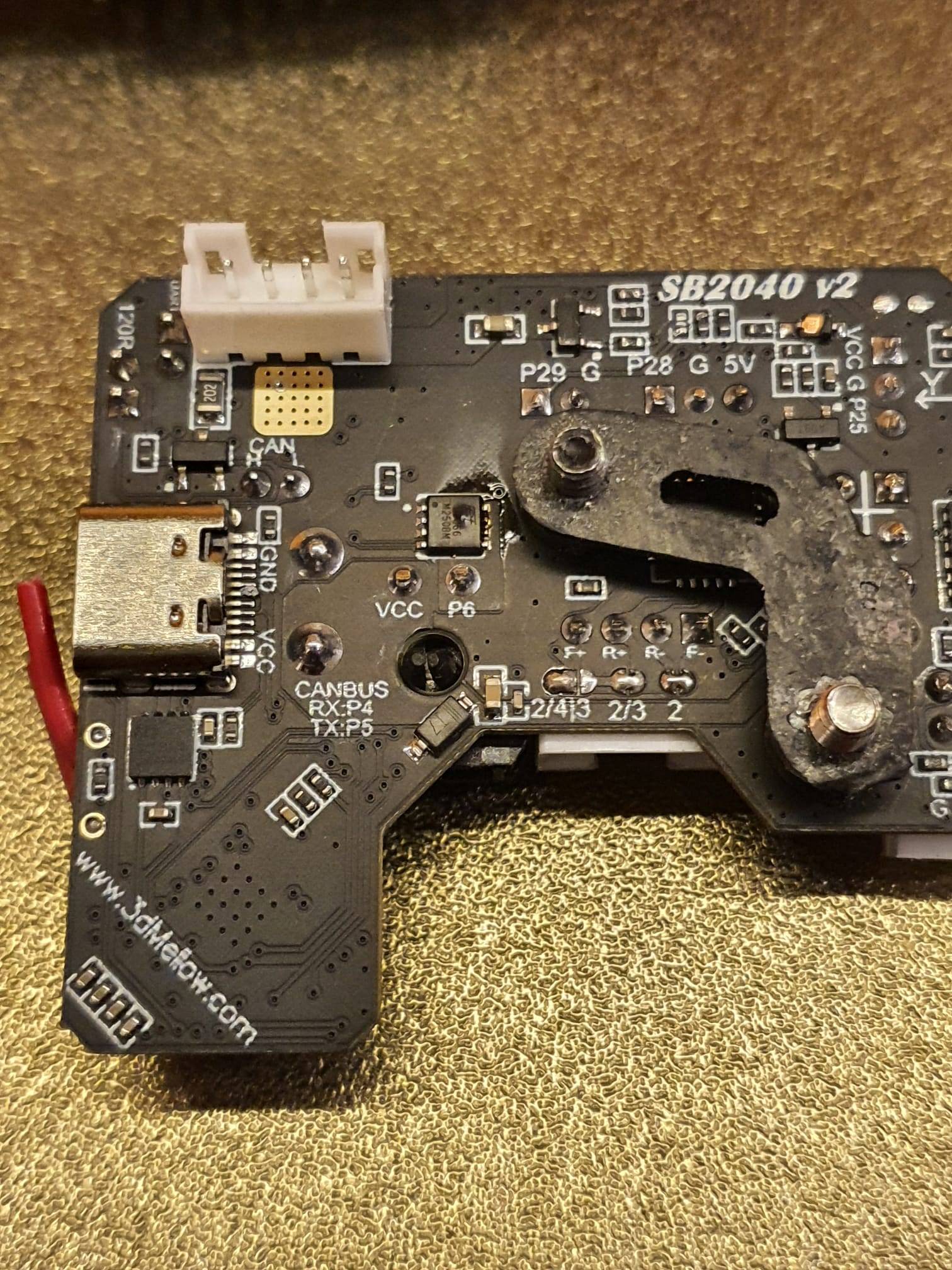
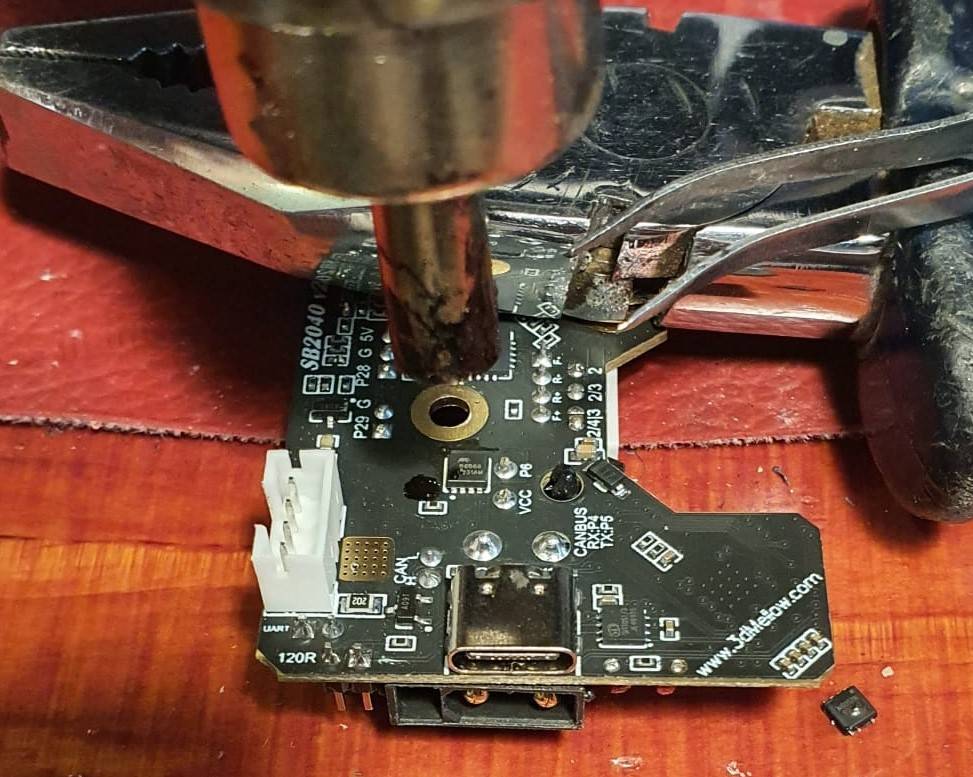
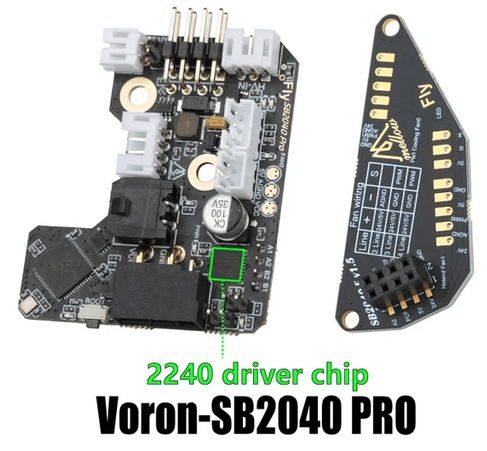
Deze printplaat is een Mellow Fly SB2040 Pro plus. Hij heeft een versnellingsmeter, een 2240 TMC en werkt met PT100 voor de verwarming. Het werkt heel goed via Canbus en mijn geïnstalleerde PICAN USB-interface op de RPI.
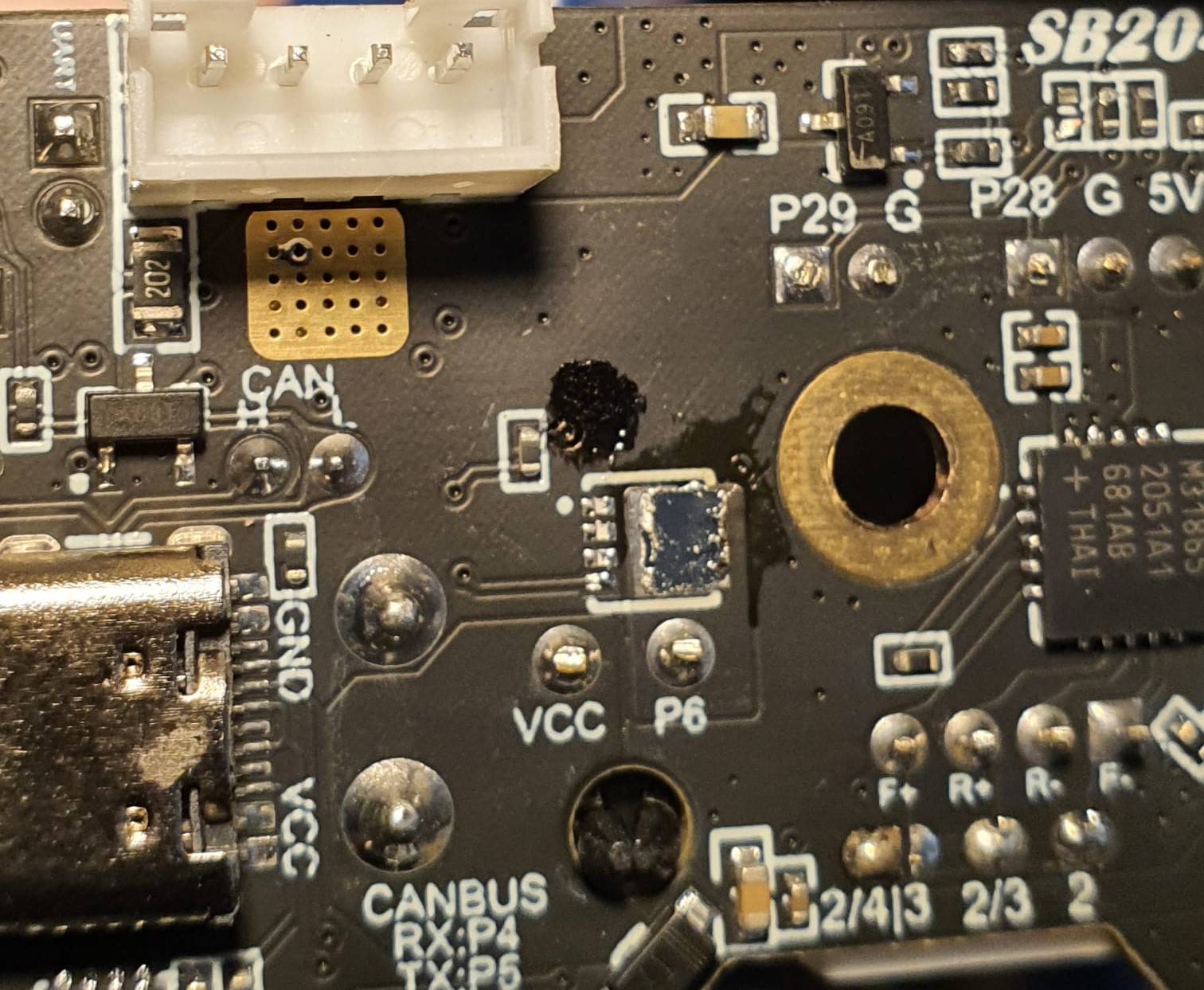
Maar toen ik een andere nozzle in de hotend monteerde, maakte ik kortsluiting in de keramische verwarmingscartridge en blies de verwarmingsmosfet op. Zie de volgende foto:
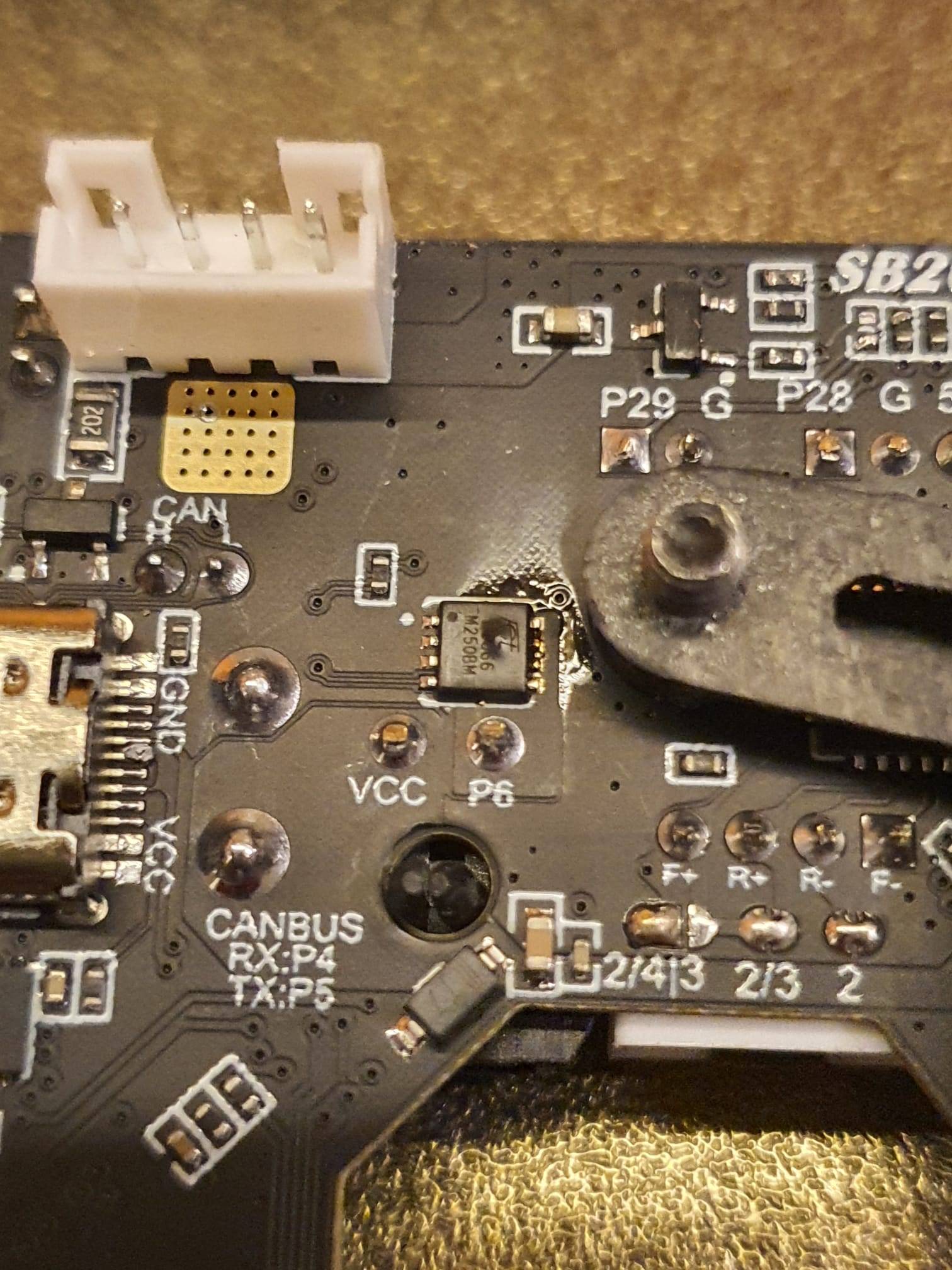
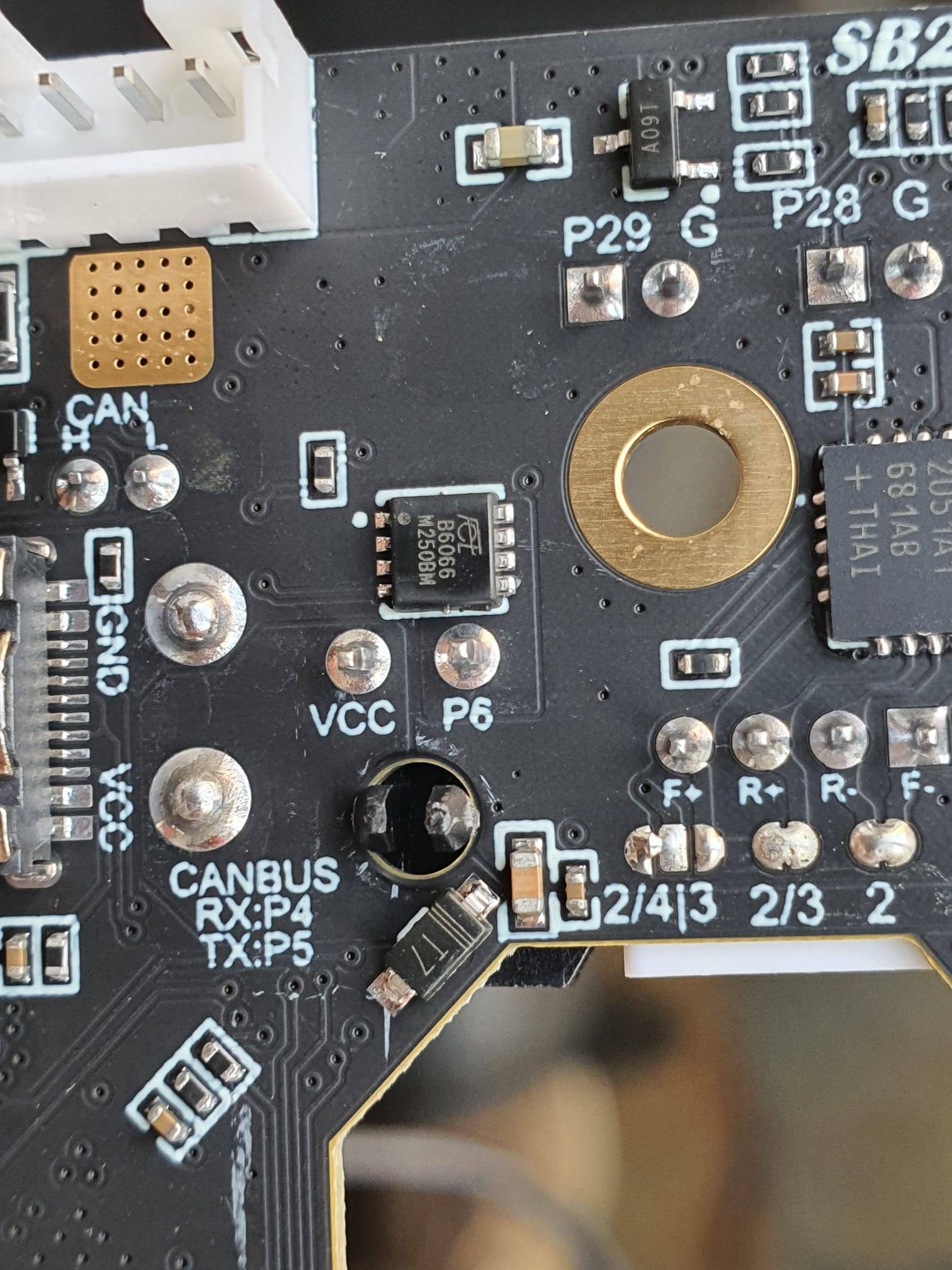
Ik heb een nieuwe print besteld en nu kon ik het onderdeelnummer achterhalen:
Ik heb uiteindelijk 5 stuks vervangende B6066 Mosfet modules besteld op Ali, en ze werden gisteren geleverd, binnen 2 weken.
Ik heb de defecte chip gedesoldeerd met mijn SMD-warmtepistool, en er een nieuwe in gedaan met datzelfde verwarmingspistool, werkt erg goed!!!
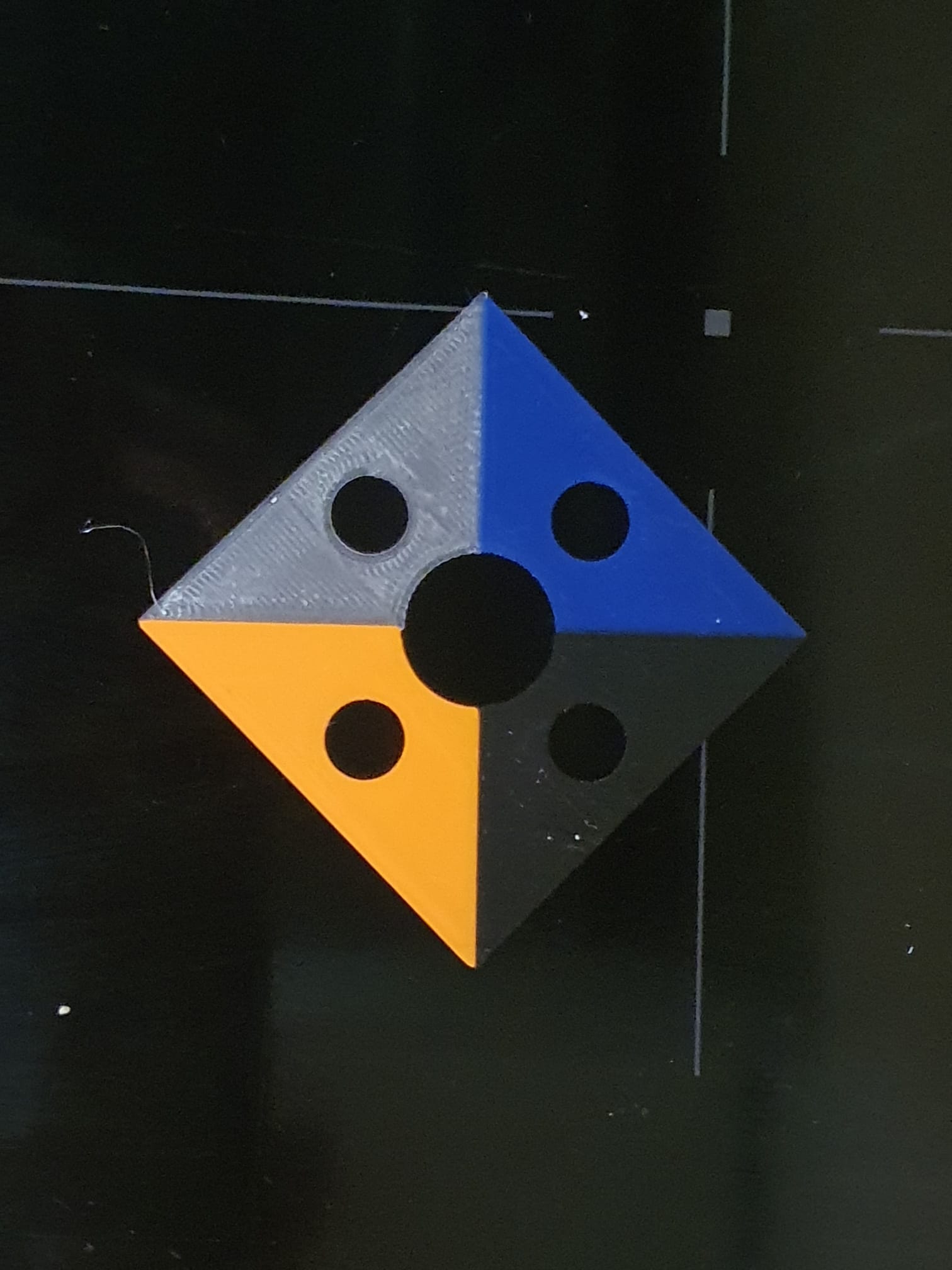
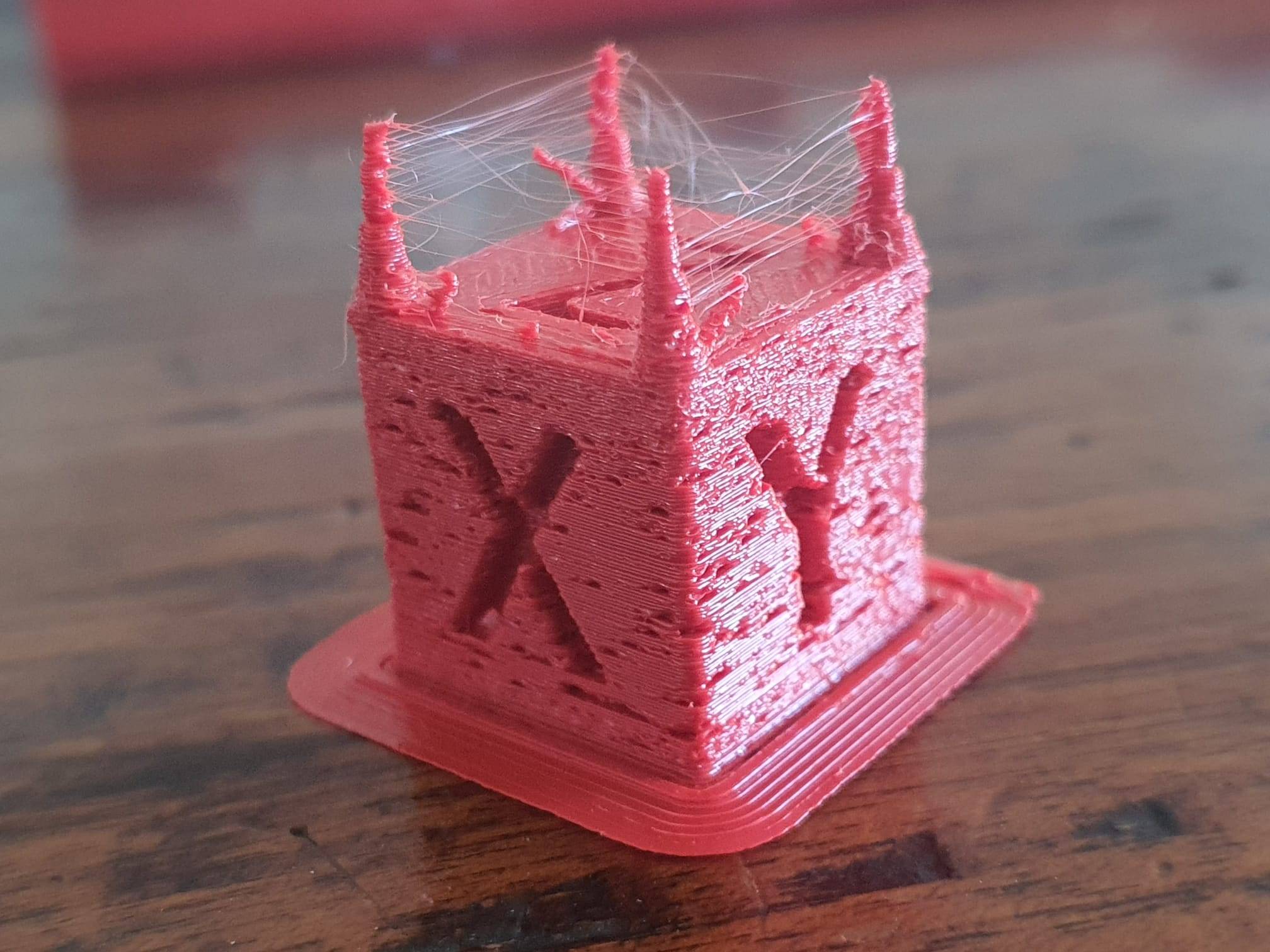
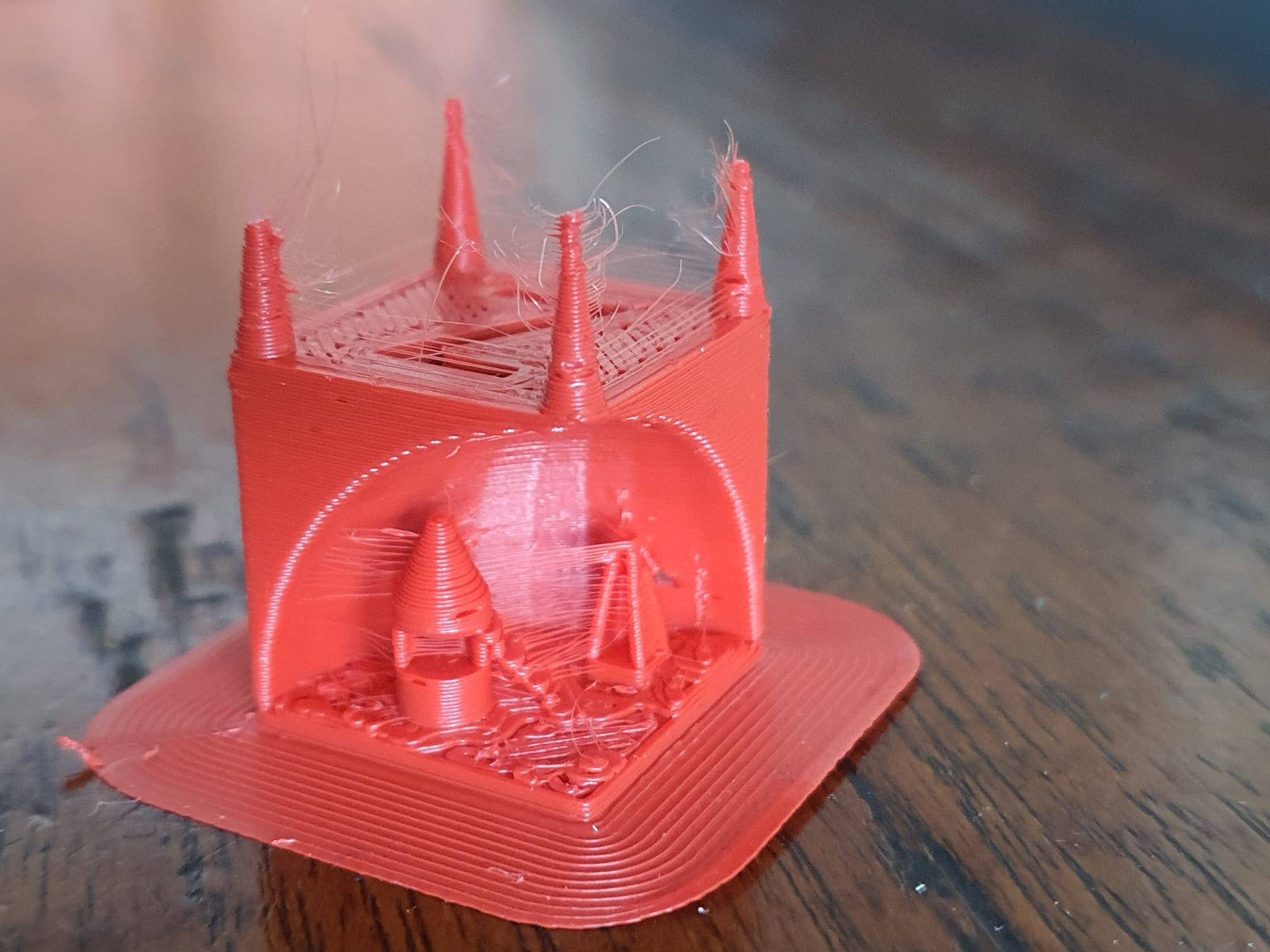
Wat is er mis met dit ABS-geprinte teststuk na mijn overstap van een standaard 0,5 mm spuitmond naar een 0,6 mm Chinese CHT high-flow spuitmond?
Ik heb niets anders veranderd dan de Curaslicer-instellingen van 0,5 mm naar 0,6 mm en ook in Klipper heb ik in de printer.cfg de instelling veranderd van 0,5 naar 0,6 mm nozzle diameter.
Uiteraard heb ik ook de gcode opnieuw (Cura) gesliced voordat ik de testblokjes printte.
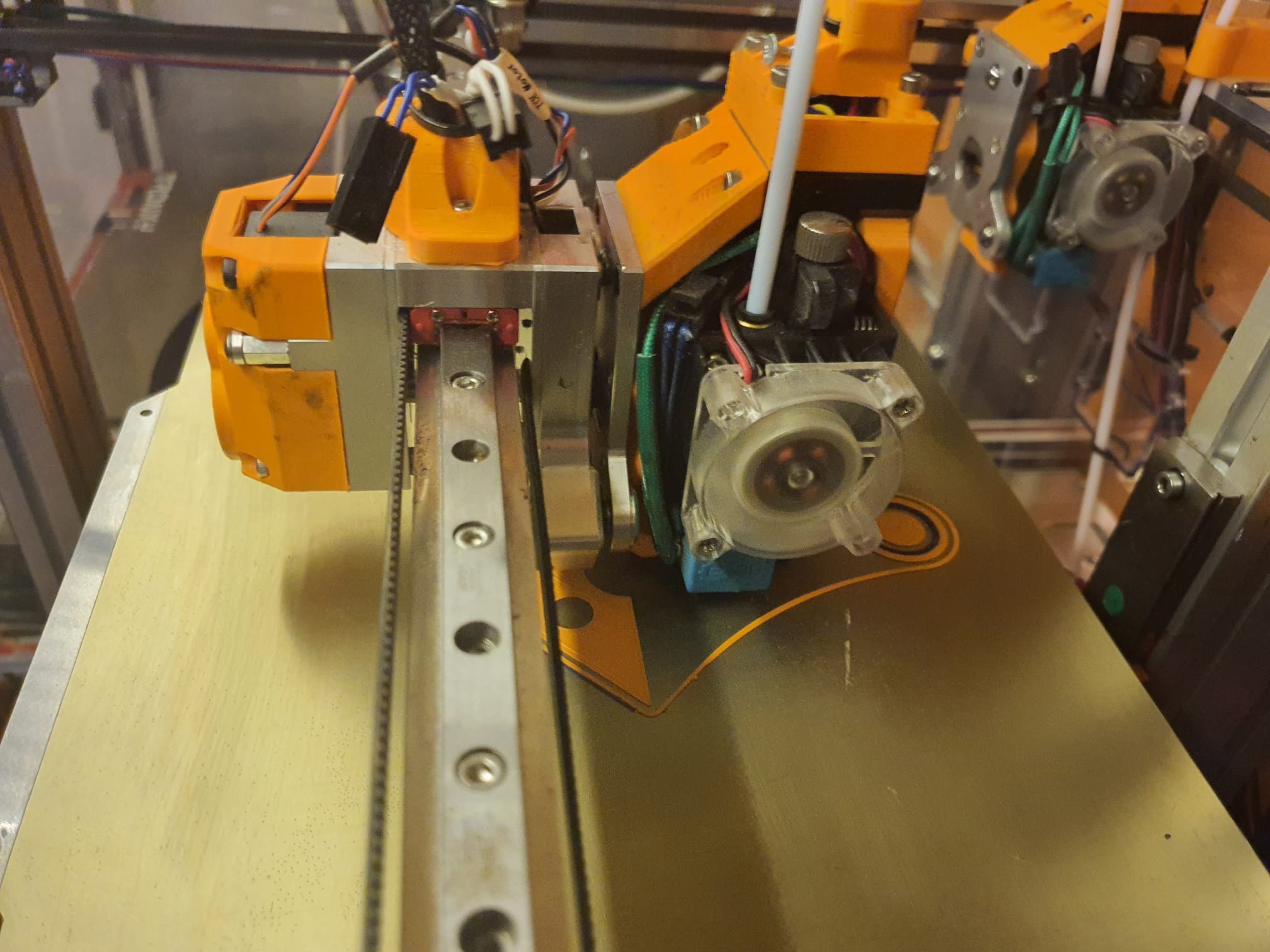
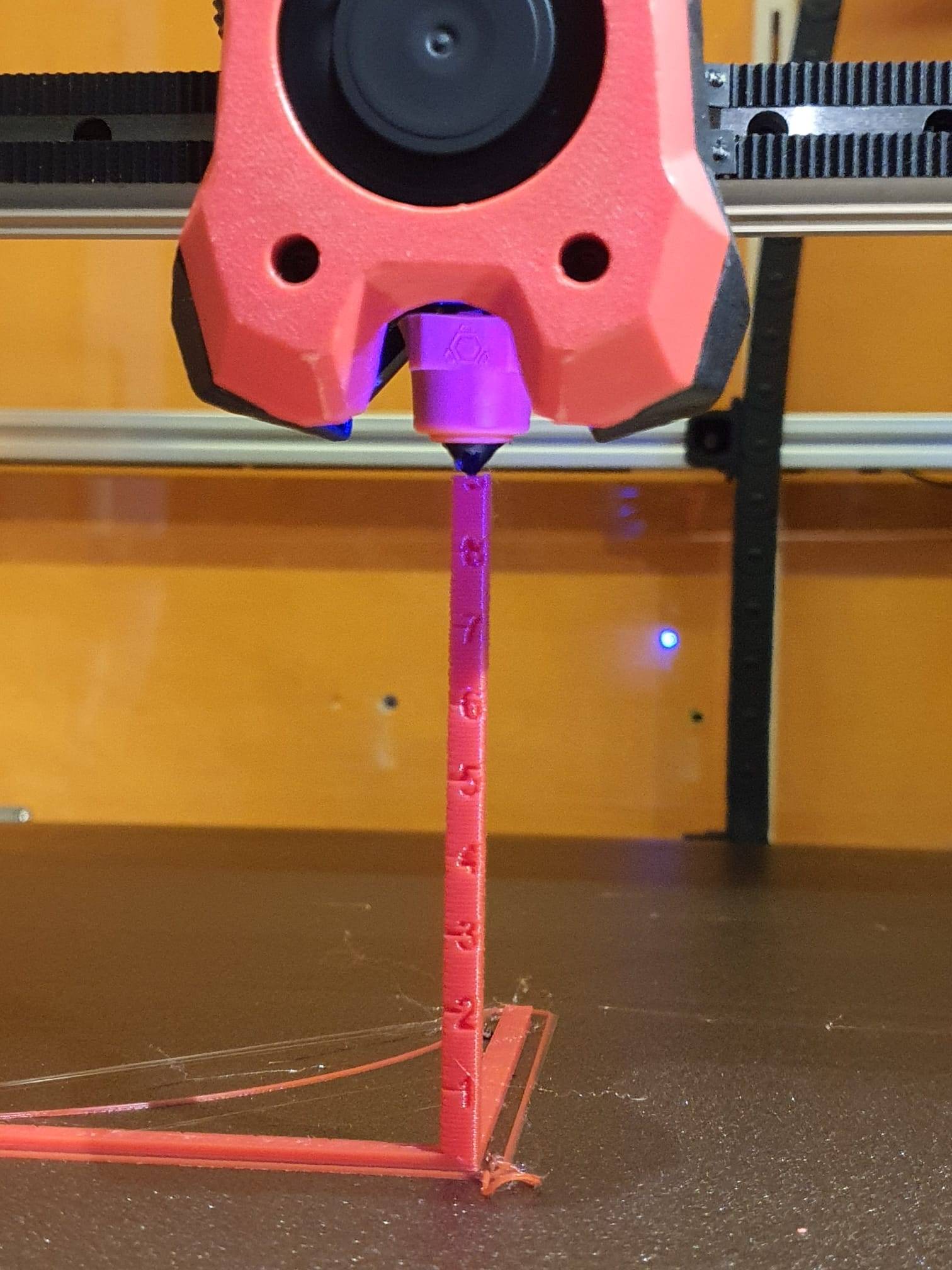
Het is geprint op mijn Voron 2.4R1- 300. met een nozzle zoals op de onderstaande foto:
Deze specifieke nozzles zouden meer flow moeten kunnen produceren omdat het invoerkanaal uit 3- in plaats van 1 gaatje bestaat. De punt is – uiteraard – slechts 1 gaatje.
Remedies:
Na de mislukte print heb ik het volgende gedaan:
Het ABS filament vervangen door een nieuwe verpakking. Geen verandering.
Ik heb de retractie-instellingen in Curaslicer gecontroleerd en die waren prima, tussen 0,5 en 1 mm.
Ik heb de gcode getest op mijn grote Voron die ook een 0,6 nozzle heeft en deze werkte prima.
Dus- ik controleerde de invoer van het filament op weerstand en dat ging heel moeilijk. Blijkbaar is er iets dat weerstand veroorzaakt in de weg van de ingesloten filament box naar de extruder.
Ik heb de filament sensor verwisseld omdat deze nogal wat weerstand veroorzaakte en dit maakte wel wat verschil in het printresultaat, maar niet zo veel.
De extruder gecontroleerd en opnieuw gekalibreerd, geen verandering nodig. 50 mm extrusie was inderdaad precies 50 mm filament dat erin ging.
Alles leek in orde, maar ik kreeg nog steeds dezelfde blobby buitenkant op het geprinte testblokje.
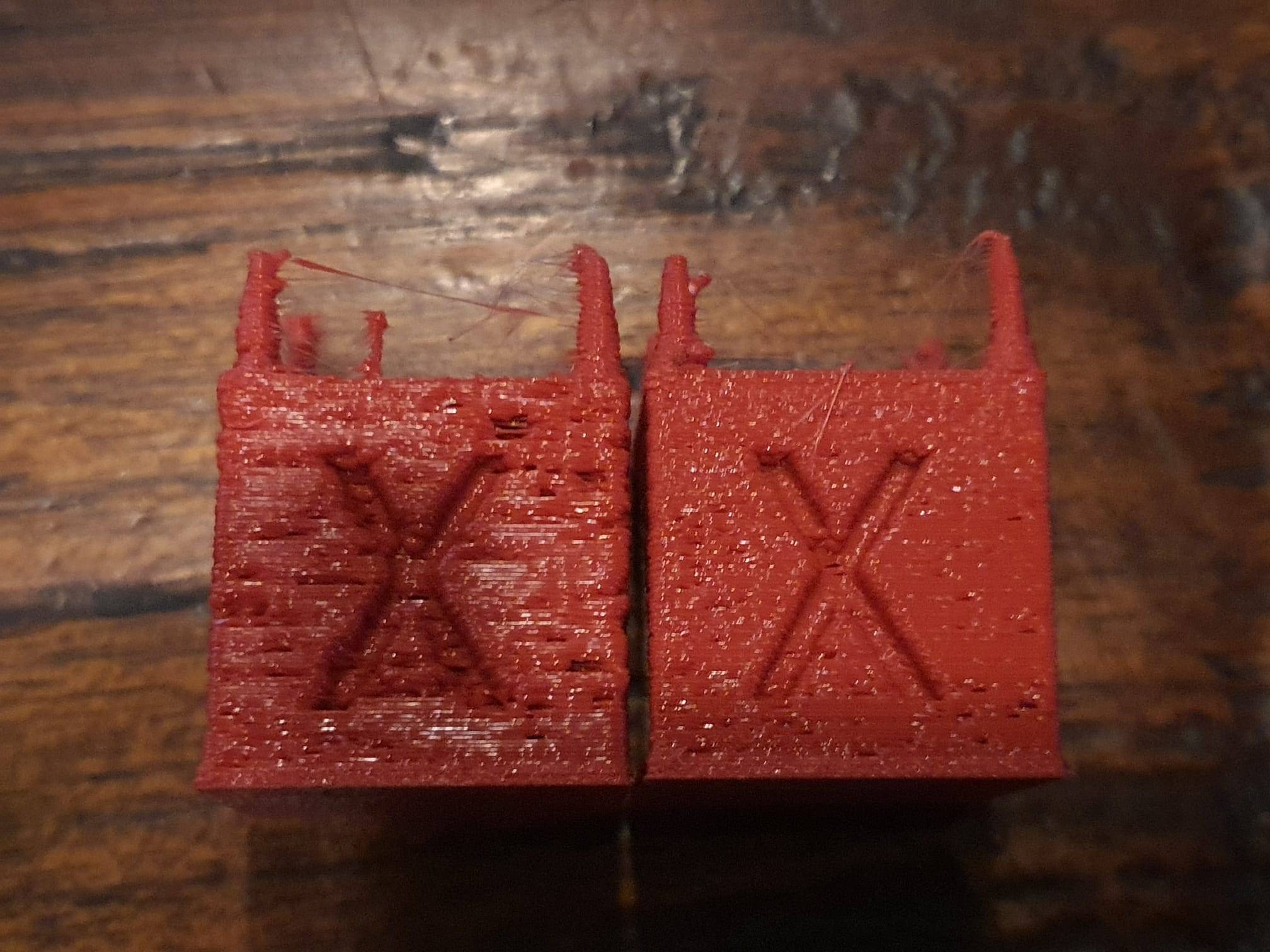
Uiteindelijk heb ik de nozzle losgeschroefd en raad eens: het is een 0,8 mm nozzle die in hetzelfde plastic zakje zat als al mijn bestelde 0,6 mm nozzles. Dit had ik natuurlijk van tevoren moeten controleren!
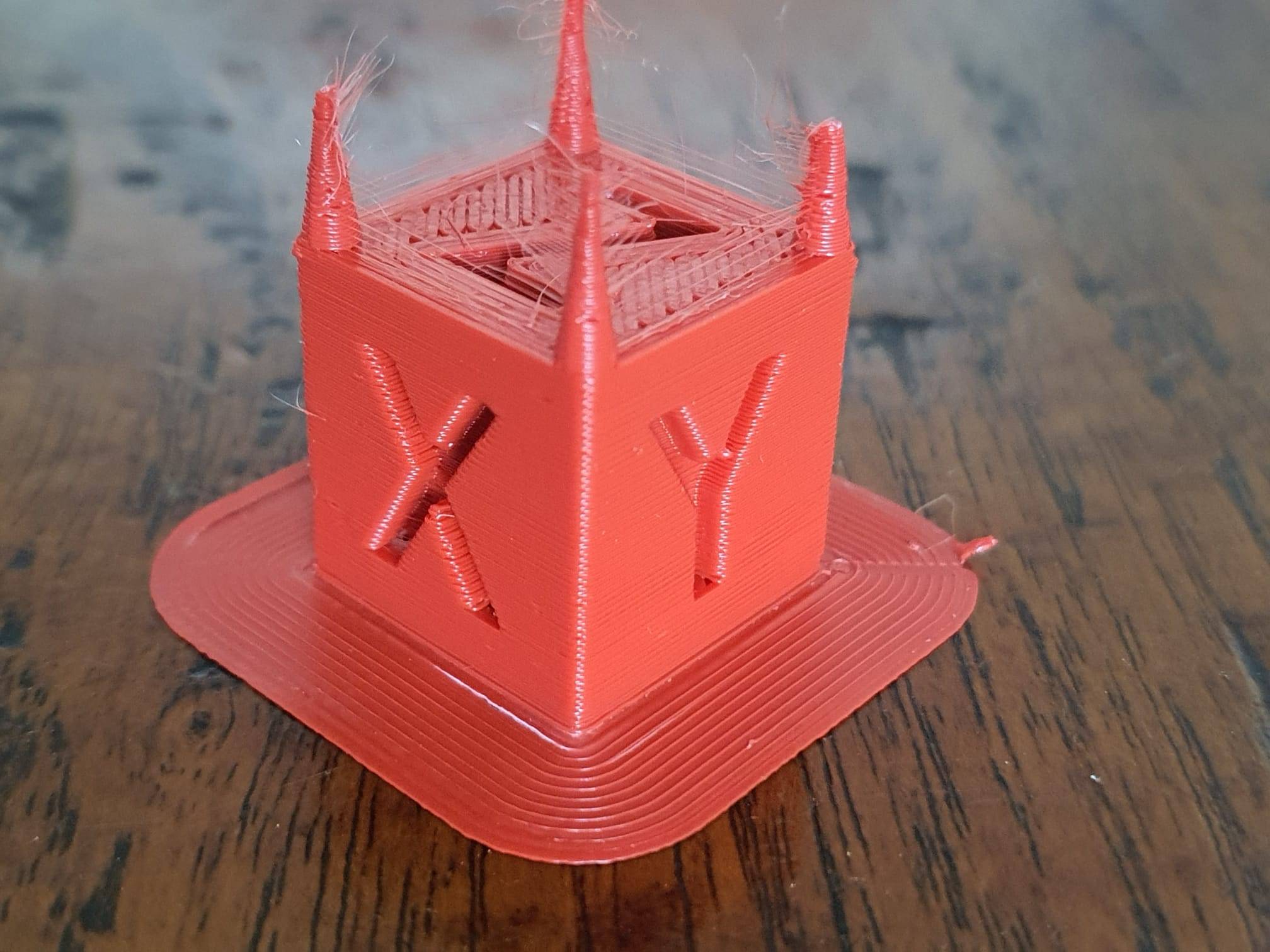
Ik heb er een nieuwe Chinese CHT 0,6 mm spuitmond uit de zak ingedaan en nu is alles weer goed! Althans – een stuk beter…. EN de afdrukken zijn redelijk goed bruikbaar,
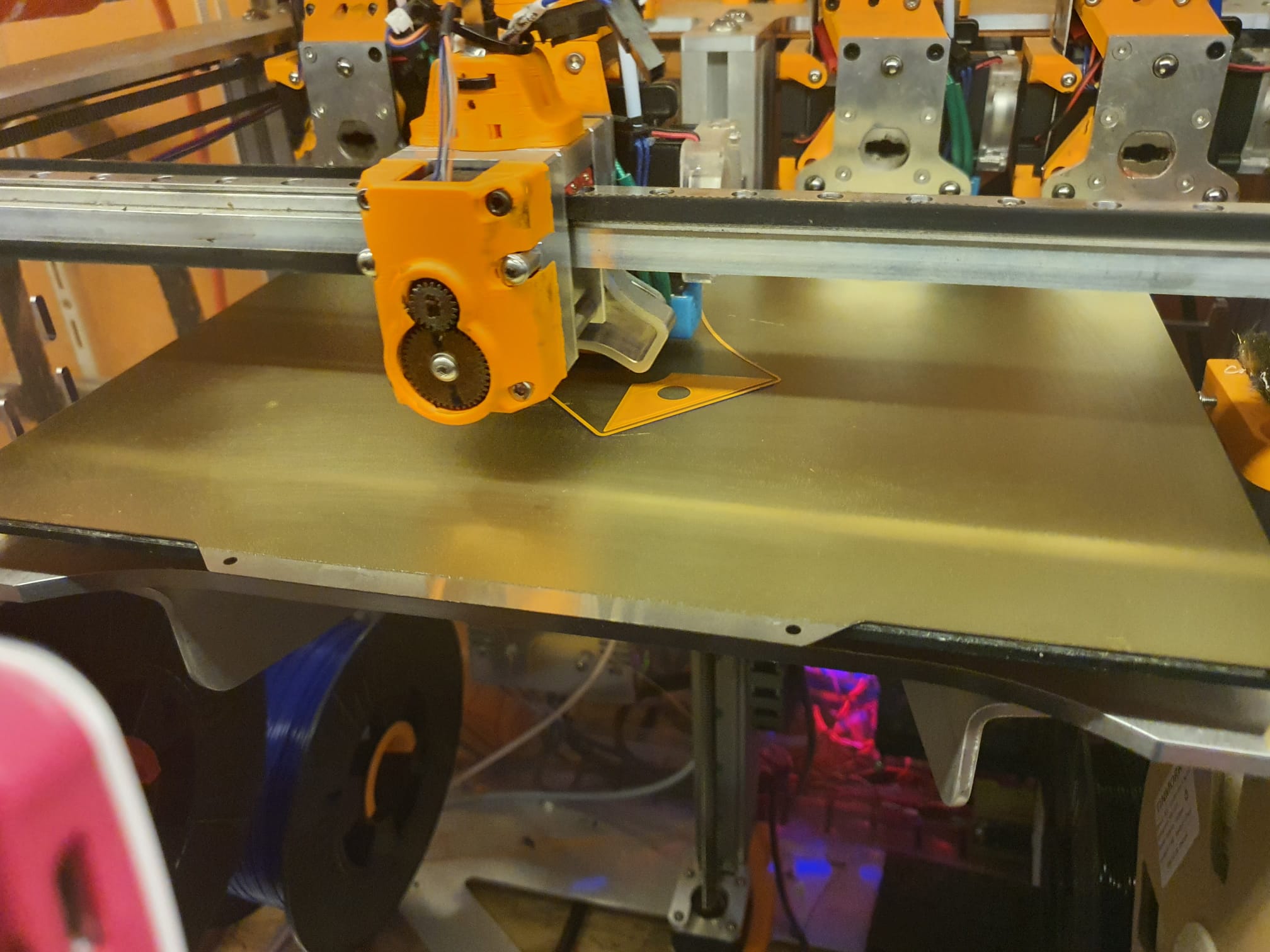
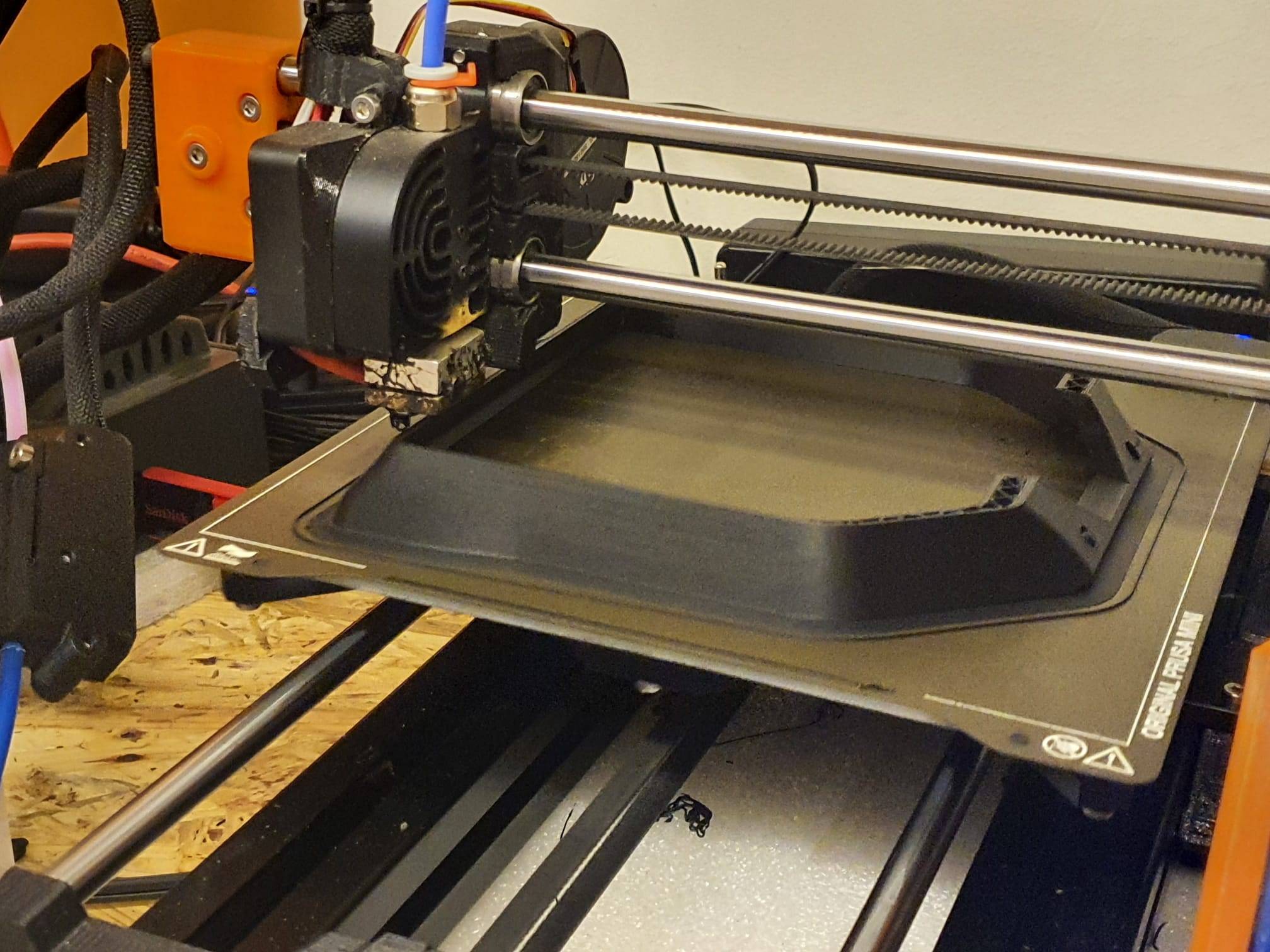
Beide foto’s: Voron 2.4 print ABS op 280 graden, Cura en Klipper instelling voor een 0.6mm nozzle. Links is een 0,8mm nozzle gemonteerd, rechts is een 0,6mm nozzle gemonteerd, Beide nozzles zijn de high-flow ‘CHT’ Chinese nozzle versies met 3 interne flowkanalen.Ik heb snel een paar rode ABS onderdelen geprint die ik nodig heb voor mijn grote Voron 2.4R2-600.
Klein resterend overblijvend probleem: vage X- en Y-wanden
Ik ben nog steeds bezig met het blobby oppervlak, zoals te zien is in de bovenstaande foto, de rechts geplaatste testkubus. Ik zal het met een ander filament proberen! Het is trouwens niet de fuzzy skin optie. Het kan te maken hebben met de hoge temperatuur die ik gebruik met dit specifieke ABS filament, afhankelijk van de toepassing ga ik tot 280 graden. Het beste is om dit eerst te proberen met PLA op 180-190 graden, denk ik.
Ik kreeg net een zogenaamd slim idee – zou het kunnen dat ik de temp voor mijn extuder altijd veel te hoog had staan en dat zo’n hoge temp door de betere nozzle met meer flow niet meer nodig is?
Dat zou kunnen verklaren waarom de afdrukken nu perfect en glanzend zijn, maar de X- en Y-wanden zijn wat wazig.
Dat zou kunnen komen door de hoge temperatuurinstelling van de extruder.
Ik zou ook kunnen proberen om de printventilator aan te zetten, of in ieder geval hoger dan mijn gebruikelijke 25% voor ABS.
Dan kan ik zien wat het effect is, of gewoon de extrudertemperatuur verlagen van 285 naar 250 voor mijn rode ABS. Probeer het eens. Ik laat het je weten!
BTW, ik heb deze ABS nog nooit geprint met een glanzend XY-oppervlak. Het was altijd mat, ook op 285 graden. Mogelijk had de standaard nozzle gewoon een hogere temperatuur nodig? Ik heb eigenlijk nog nooit van zoiets gehoord, we zullen zien.
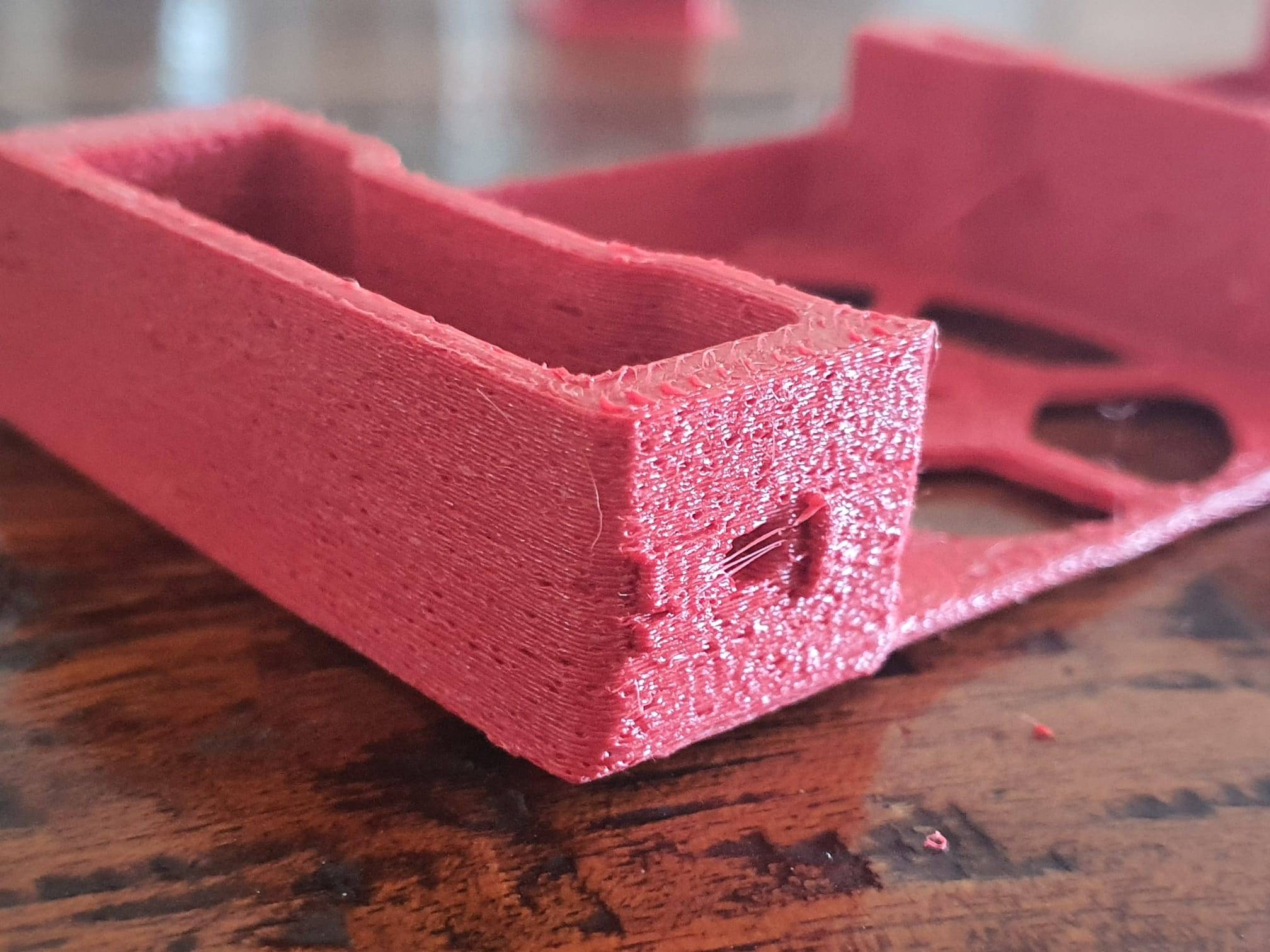
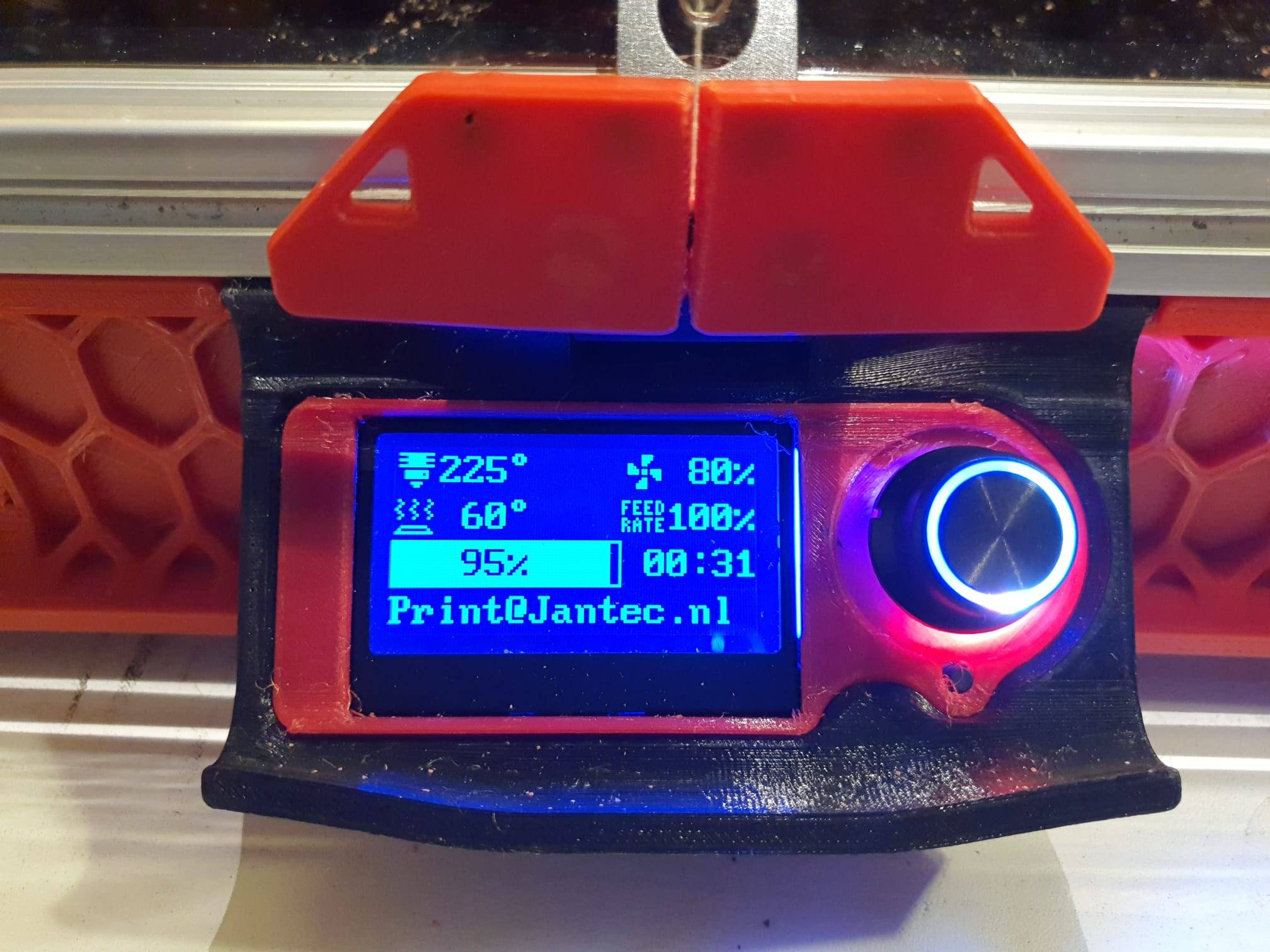
De volgende 2 foto’s laten zien wat het printresultaat was toen ik printte op 240 graden, 0,6mm nozzle en de rest was onveranderd…
De wanden printten best mooi, alleen de bovenkant is niet wat ik wil. Ik moet daar in de slicerinstellingen nog eens naar kijken
Voorheen had ik nooit last van stringing met het rode ABS filament. Dit was ook een stuk minder toen ik dit ABS testblokje op 240 graden printte in plaats van 285 graden.
Ik zal nog een laatste test doen met de optie om het Z-oppervlak beter glad te maken, dat zal ik hier ook laten zien! Het kan ook zijn dat de wandbreedte voor het bovenvlak verkeerd is ingesteld, we zullen zien. Of de temp voor final printing te laag, of de part-fan iets te veel op 30%?
Uiteindelijk heb ik de beste balans gevonden voor dit rode ABS filament, in combinatie met deze nozzle: 265 graden nozzle, 110 graden bed, 25% fan na 4 mm. printsnelheid 140mm. Dat produceert sterke prints, vrijwel geen stringing en geslogten opppervlakken aan onder- zij- en bovenkant!
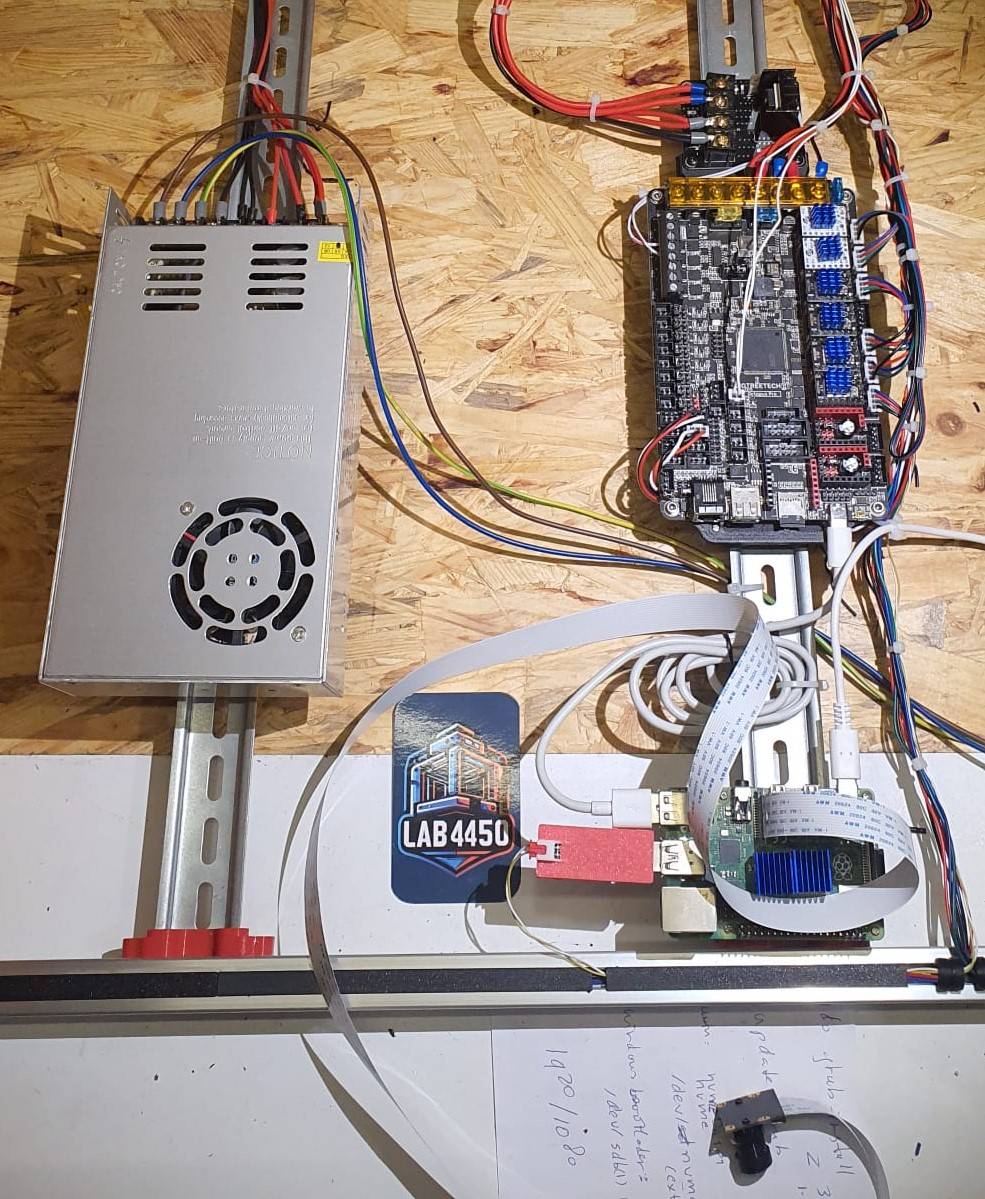
De keuze voor de hard- en firmware van de elektronica is als volgt:
Raspberry PI4B 2GB met MAINSAIL en Klipper
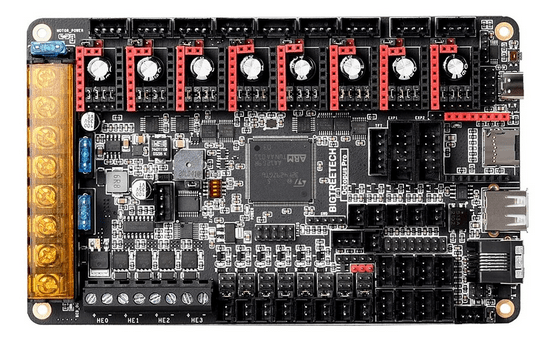
Octopus pro 1.01 F429 1MB moederbord met KLIPPER firmware
PICAN CANBUS adapter USB-CANBUS met Candlelight firmware
Mellow/Fly SB2040 PROplus CANBUS module voor de toolhead met CANboot en Klipper firmware
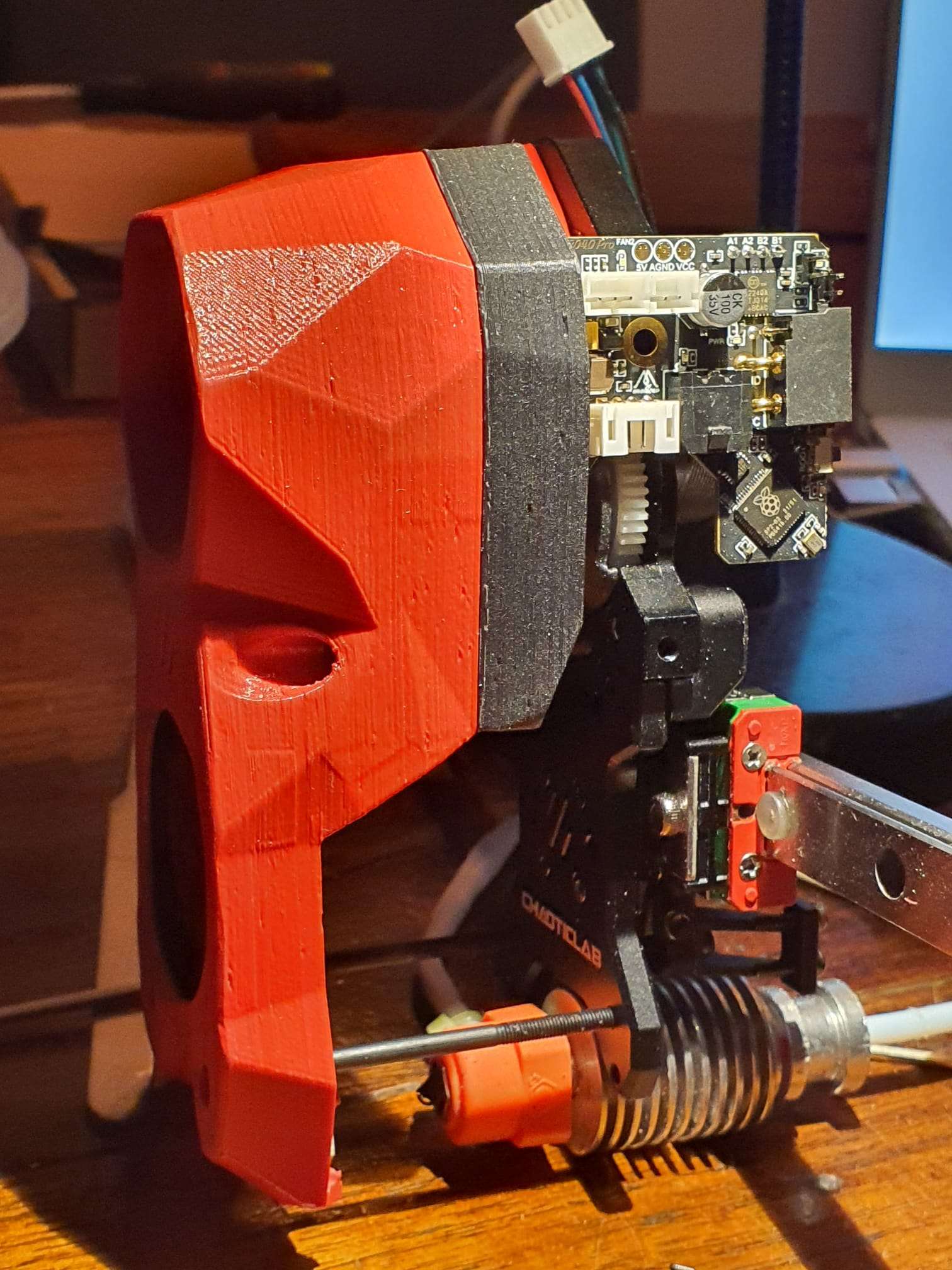
BTT Knomi V2 in de Stealthburner kop
10-LEDS opstelling met 8 minileds voor het Voron LOGO en 2 RGB LEDS voor de verlichting van de nozzle van de Stealthburner
Fot van het passen van de onderdelen op de Stealthburner. Hierbij zit ook de TAP Z-sensor van ChaoticLab. Toen ik de onderdelen monteerde, had ik het KNOMI-front nog niet geplaatst op de Stealthburner.
Raspberry PI, gebrand met meest simpele RPI’s Debian basispakket via raspberry pi imager
via de PUTTY interface : Installeer KIAUH, en daarna: start KIAUH
Auto-startfile gemaakt voor de Canbus in de PI en opnieuw opgestart
Installeer Klipper op de Mellow/Fly SB2040 Proplus via de Canbus interface PICAN-SB2040
Maak het klipper.bin bestand voor het Octopus bord binnen Klipper op de PI en brand het vervolgens als firmware.bin op een FAT-32 geformatteerde microSD kaart. Plaats vervolgens de microSD-kaart in het OCTOPUS-bord om de KLIPPER-firmware te laden.
installeer een paar ondersteunende pakketten op de PI viaPUTTY
NB: In plaats van MAINSAIL kunt je Fluidd of Ocvtoprint gebruiken. Maar- Mainsail geeft je naast printmanagement ook direct toegang tot al je configuratiebestanden, daarom gebruik ik Mainsail.
Voor een specifieke printopdracht heb ik echt een grote 3d printer nodig.
Het maximum dat ik voorheen in volume kon printen was 330x330x400 op mijn A30M.
Maar die printer kan alleen PLA printen omdat hij geen behuizing heeft en het glazen bed niet in staat is om boven de 70 graden Celsius te komen.
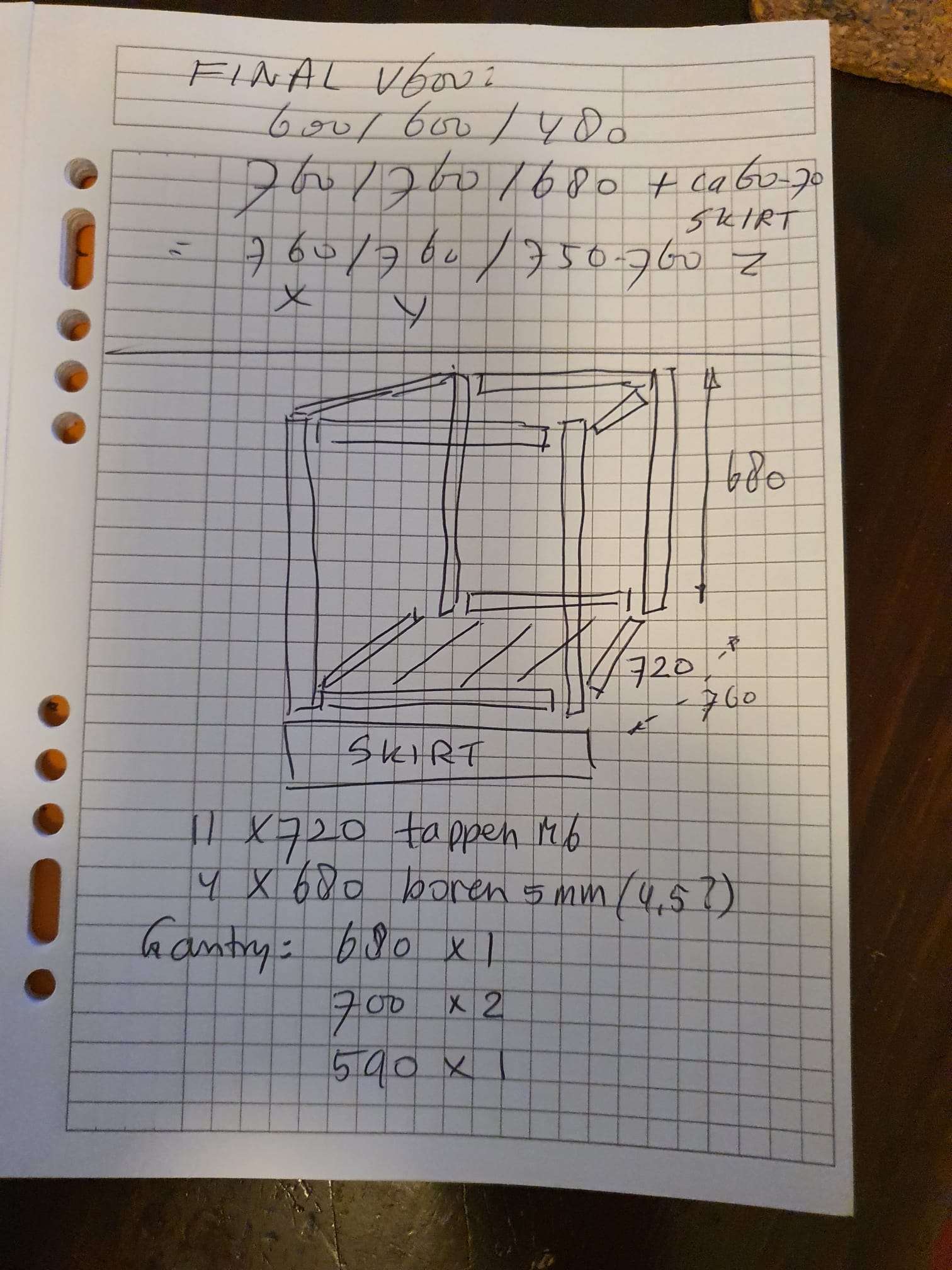
Na veel zoeken heb ik besloten om een nieuwe Voron 2.4 3d printer te bouwen met de afmetingen 600 x 600 x 480 mm. De belangrijkste reden voor deze bouw is dat ik graag iets bouw in plaats van iets te kopen dat ik achteraf toch weer wil veranderen.
De buitenmaat van de printer voor deze bouw is 760x760x750, wat precies past bij mijn beschikbare ruimte.
Omdat de deuropening van mijn printhok 700 mm in de breedte is, kan ik de Voron 2.4 niet groter bouwen dan dit, in ieder geval niet aan een van de zijkanten.
De printer moet natuurlijk wel de kamer uit kunnen als dat nodig is.
Daarom wordt de hoogte van de buitenkant 700.
Dit betekent dat de maximale Z-printhoogte ‘slechts’ 480 mm zal zijn.
Als de printer ooit naar buiten moet, wordt de kap verwijderd en moet hij 90 graden worden gekanteld voordat hij naar buiten kan.
Maar dat is prima, ik denk niet dat de printer snel weg zal gaan.
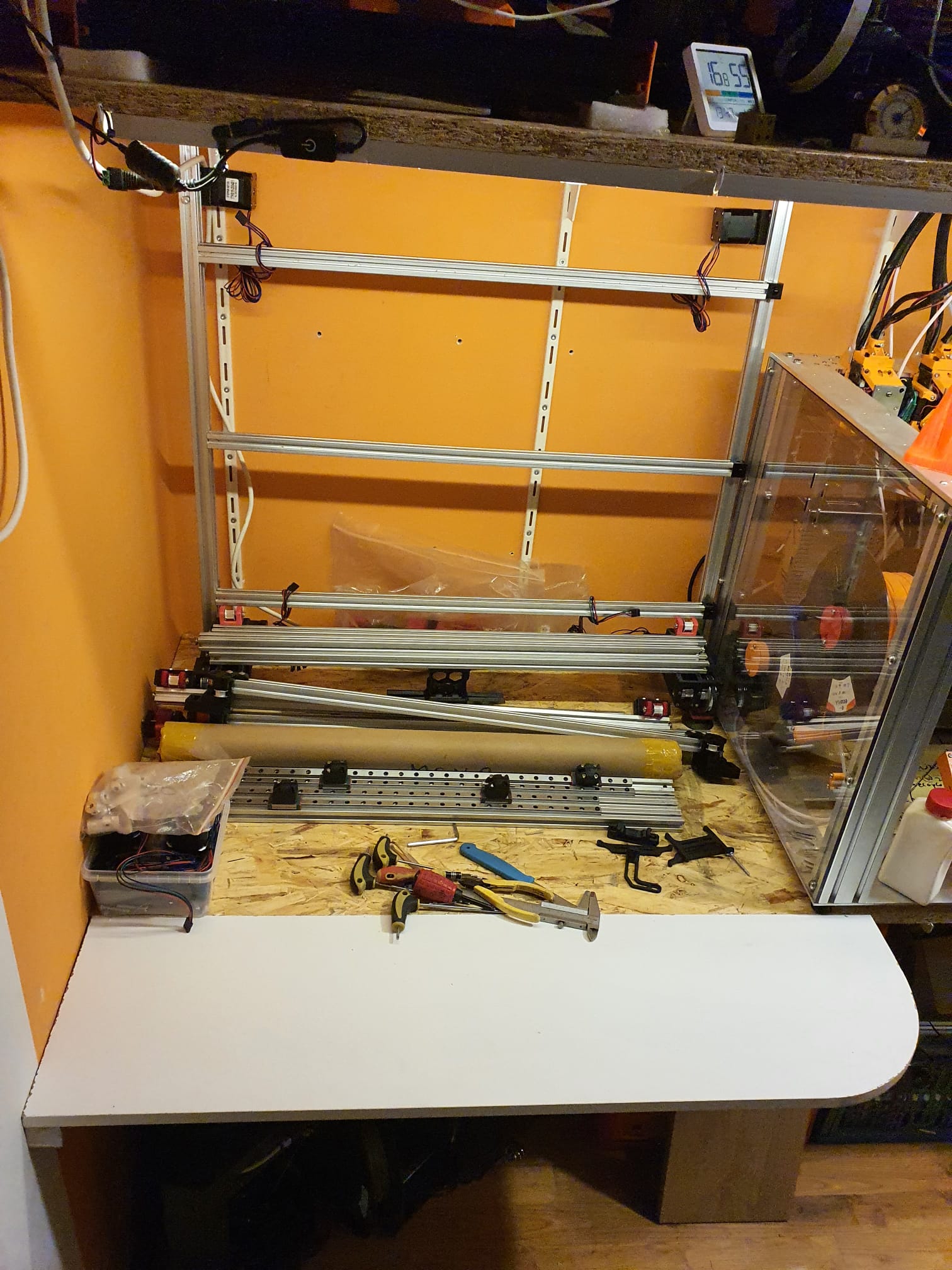
De bouw gaat vrij snel. Alle elektronica en geprinte onderdelen zijn beschikbaar.
De 2020 extrusies zijn gisteren (26 januari 2024) geleverd, dus komende week week ga ik de extrusies snijden, boren en van schroefdraad voorzien en begin ik met de bouw van het frame.
Octopus pro F429 (more memory for using with Klipper)
Mellow Fly SB2040 pro voor in de Stealthburner met alles wat je nodig hebt in één klein pakketje: 2240 driver. hotend driver en temp reader, fan drivers, PT100 converter, RP2040 chip, meerdere aansluitingen voor eindstops, RGB voor LEDs, en bovenop dit alles is er een interne accellerometer aangesloten op de SPI pinnen van de RP2040!
Andere mogelijkheden om de printer te kunnen verplaatsen zijn ook overwogen.
Gdeeltelijk demonteren kan natuurlijk ook, maar is wel erg omslachtig.
Er hoeft maar één kant binnen de 700 mm te zijn en dat zou ook de diepte van de constructie kunnen zijn.
Als ik hiervoor zou kiezen, zou het printbare volume 600 mm breed x 540 mm diep x 600 mm hoog zijn.
Dat lijkt veel beter dan 600x600x480.
MAAR – in mijn ervaring met het printen van GROTE onderdelen, heb ik nooit de top van mijn grote printers bereikt.
Bij mijn grote prints was altijd alleen de X en Y zo groot mogelijk nodig.
Klinkt dat logisch? Uiteindelijk ben ik daarom bij de kleinere Z-hoogte gebleven omdat dit ook goed past \bij mijn beschikbare ruimte.
My Voron 300 with the top head mounted. This gives the required clearing when printing higher objects.
De stealthburner extruder inclusief hotend, hoewel nog niet geïnstalleerd, en de SB2040pro CANBUS-module. De KNOMI-module wordt later ook geïnstalleerd.
Zoals op de bovenstaande afbeelding te zien is, heb ik ook de CNC-bewerkte TAP-module van chaotic lab met de OMRON-sensor geïnstalleerd.
Omdat ik een bed ga gebruiken met een X-Y van 600×600 mm, verwacht ik dat ik een zeer goede Z-sensor nodig heb, zoals hopelijk de TAP zal blijken te zijn.
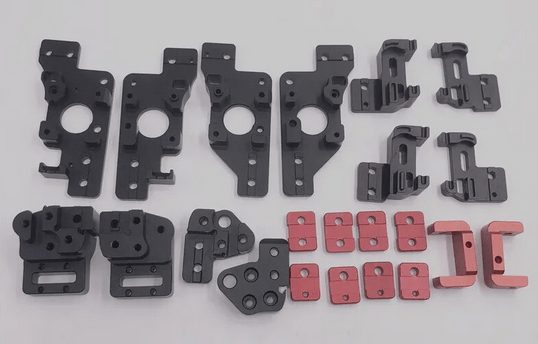
Eerst zijn de extruderonderdelen en alle bewegingsonderdelen geprint.
Gelukkig waren er al wat onderdelen voor de Z-assen over van een eerdere bouw. Voor het portaal kocht ik een complete set CNC-bewerkte aluminium onderdelen.
aluminum CNC parts for the gantry
aluminum back plate for the Clockwork extruder, the top part of the stealthburner extruder.
Voorlopig maak ik de buitenkappen van dun triplex hout.
Pas als alles goed is en ik weet dat de printer perfect werkt, zal ik beslissen hoe ik verder ga.
Mijn eerdere model Voron 2-300 heeft allemaal transparante acrylaatkappen en dat is mooi, maar altijd vies van de dampen.
Ik ga misschien aluminium dibond gebruiken aan alle zijden behalve de voorkant.
Als ik dibond gebruik, schroef ik het direct op de 2020 profielen om zoveel mogelijk stevigheid te krijgen.
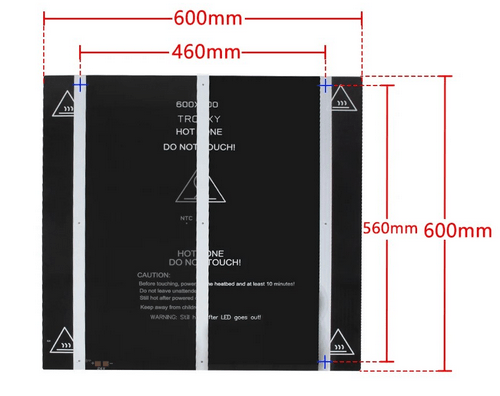
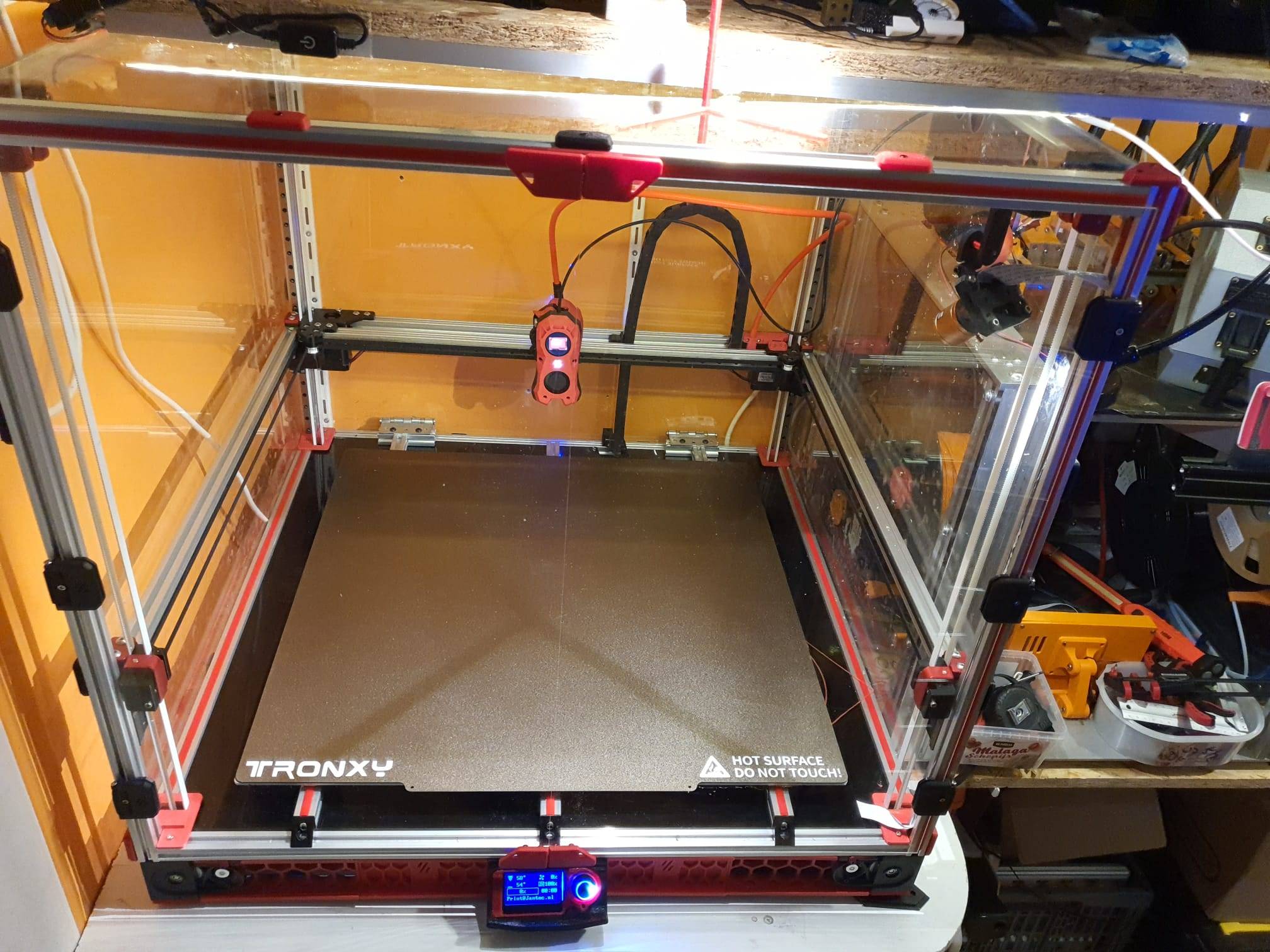
Als hotbed is een Tronxy 24 Volt 500 Watt 600×600 verwarmd bed besteld en ontvangen, zoals wordt gebruikt in de grootvolume HEVO-printer van Tronxy. Bedankt Tronxy!
In deze bouw zal ik 3 extrusie 2020 onderdelen gebruiken om dit grote bed in het frame van de Voron te monteren.
Het bed zal inclusief extrusies kantelbaar en scharnierend aan de achterkant worden gemonteerd.
Ik denk niet dat ik de printer ooit zal omdraaien als hij eenmaal op zijn plaats staat in mijn printerwerkplaats.
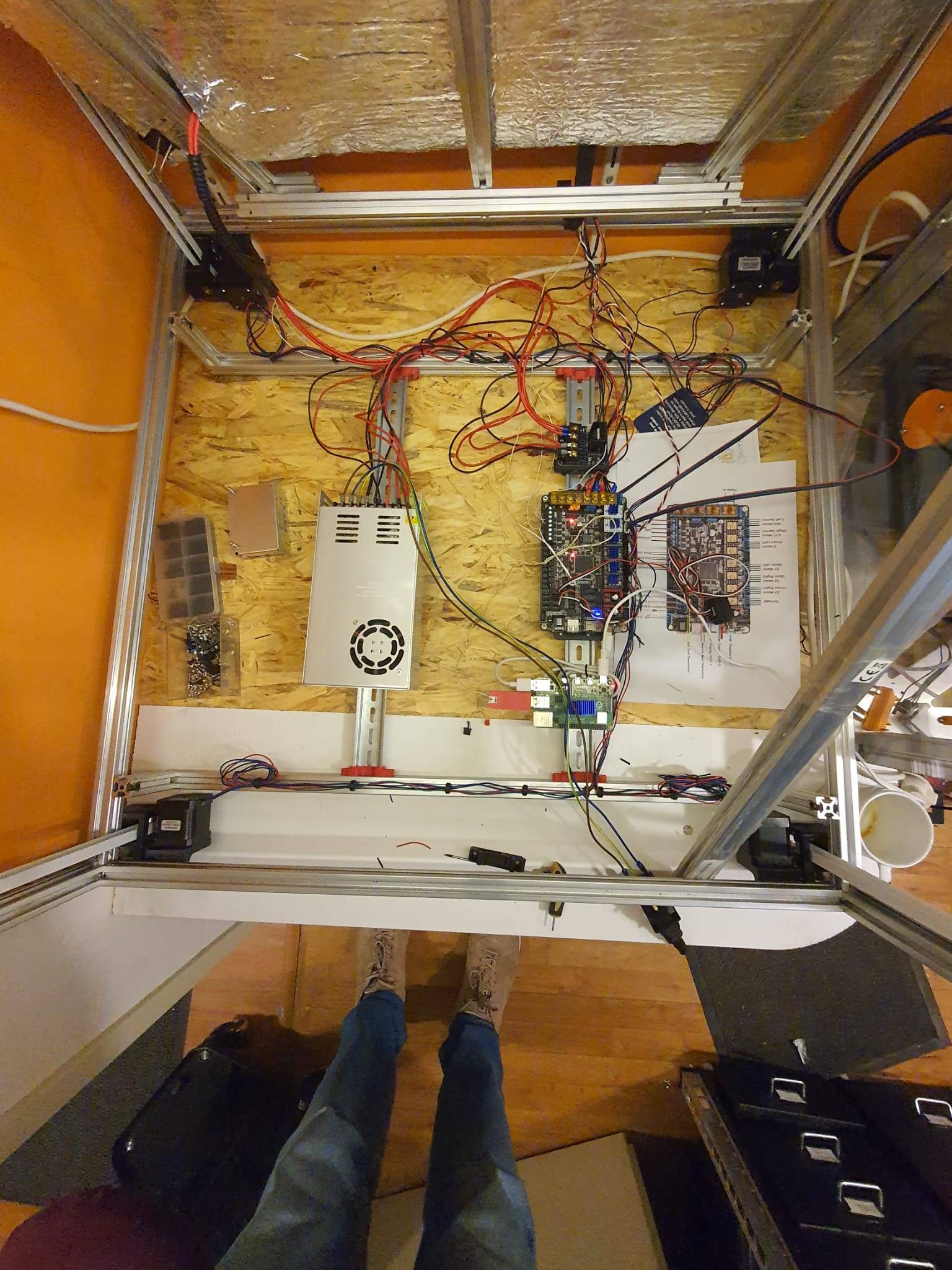
Om bij de elektronica te kunnen is het maken van een kantelbaar bed echt de enige oplossing.
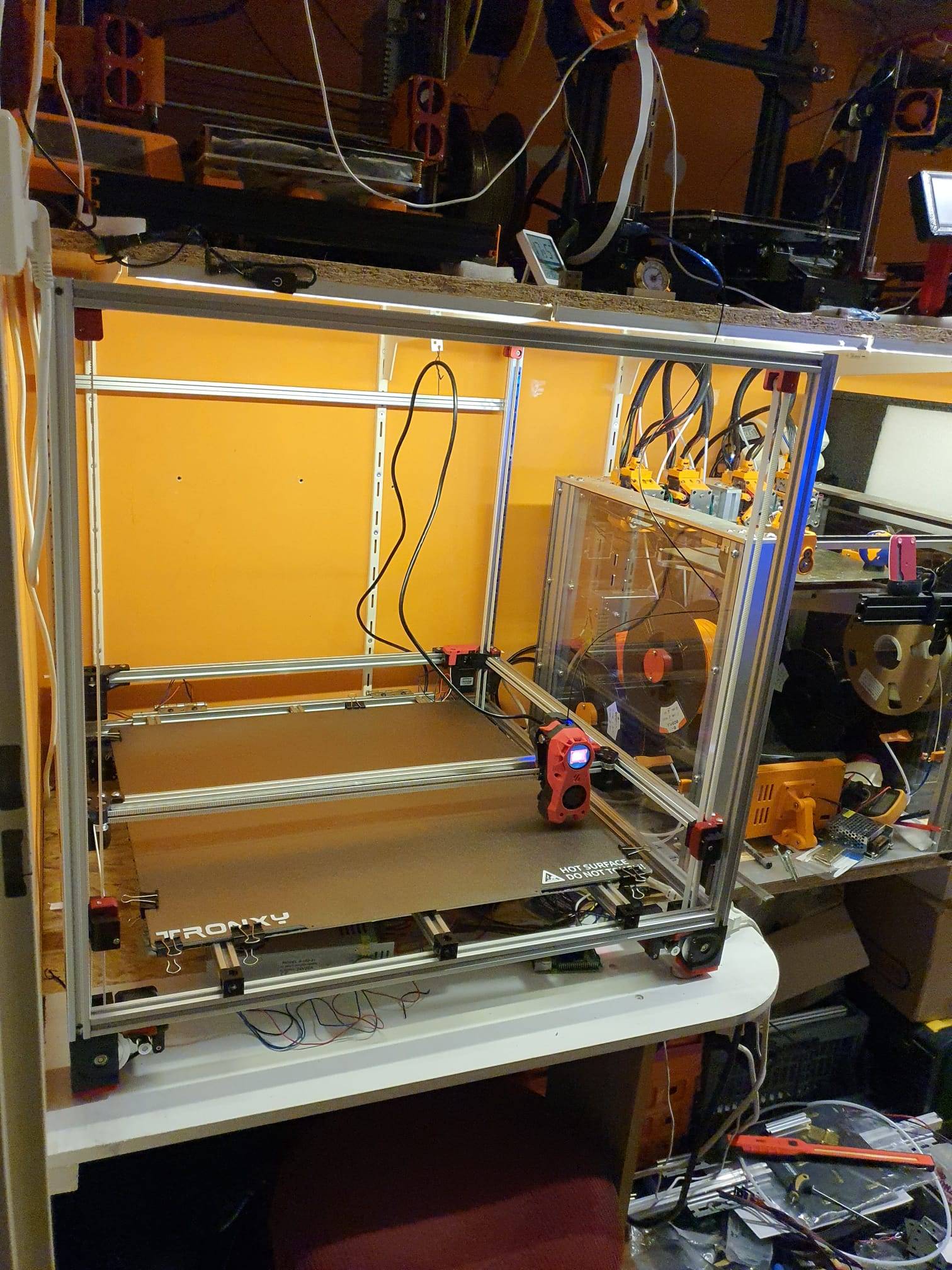
Helemaal werkend, ook de Mellow Fly SB2040 PRO met TMC2240 (met SPI en met DIAG1 op pin sb2040:gpio8!!)
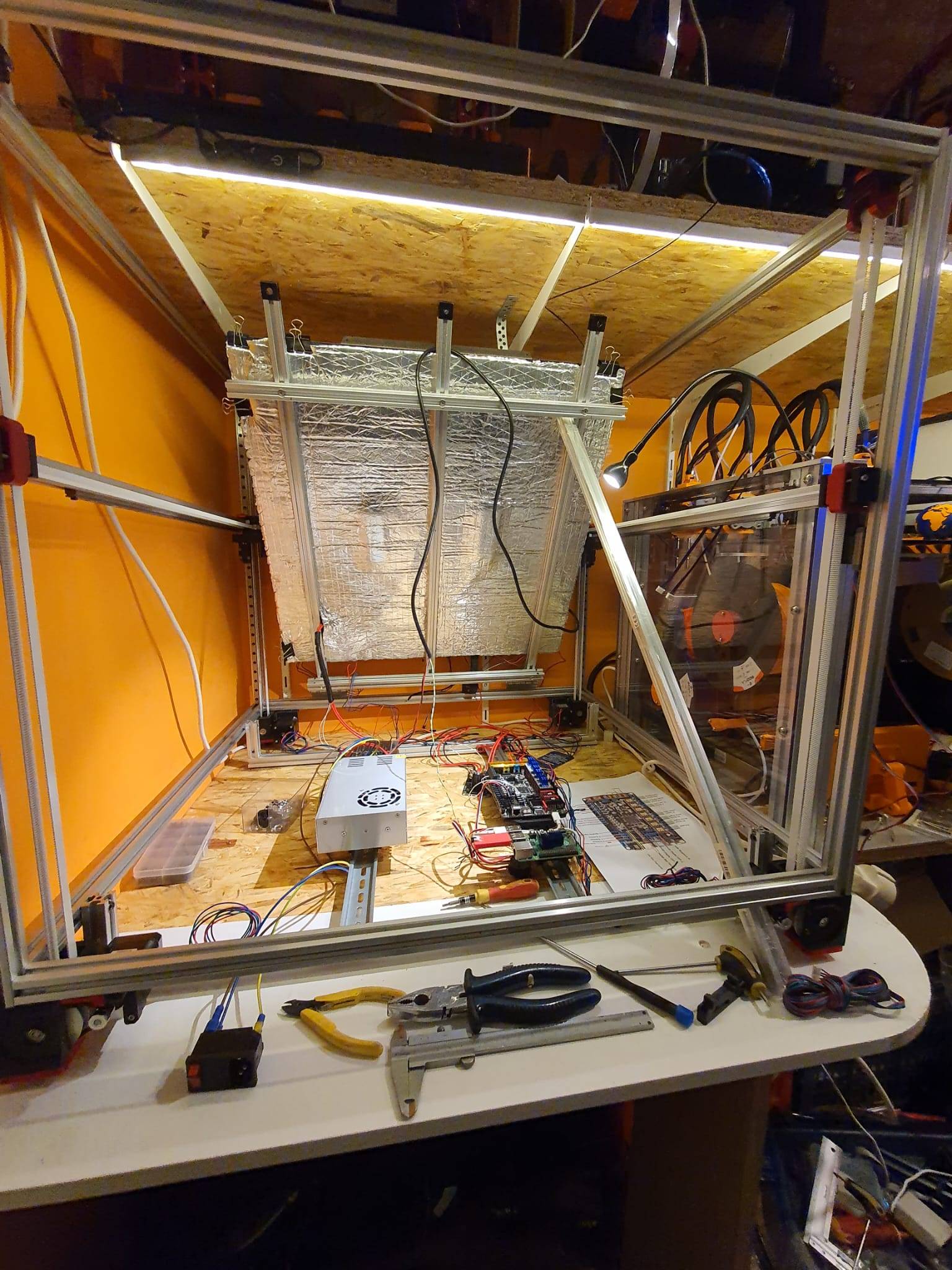
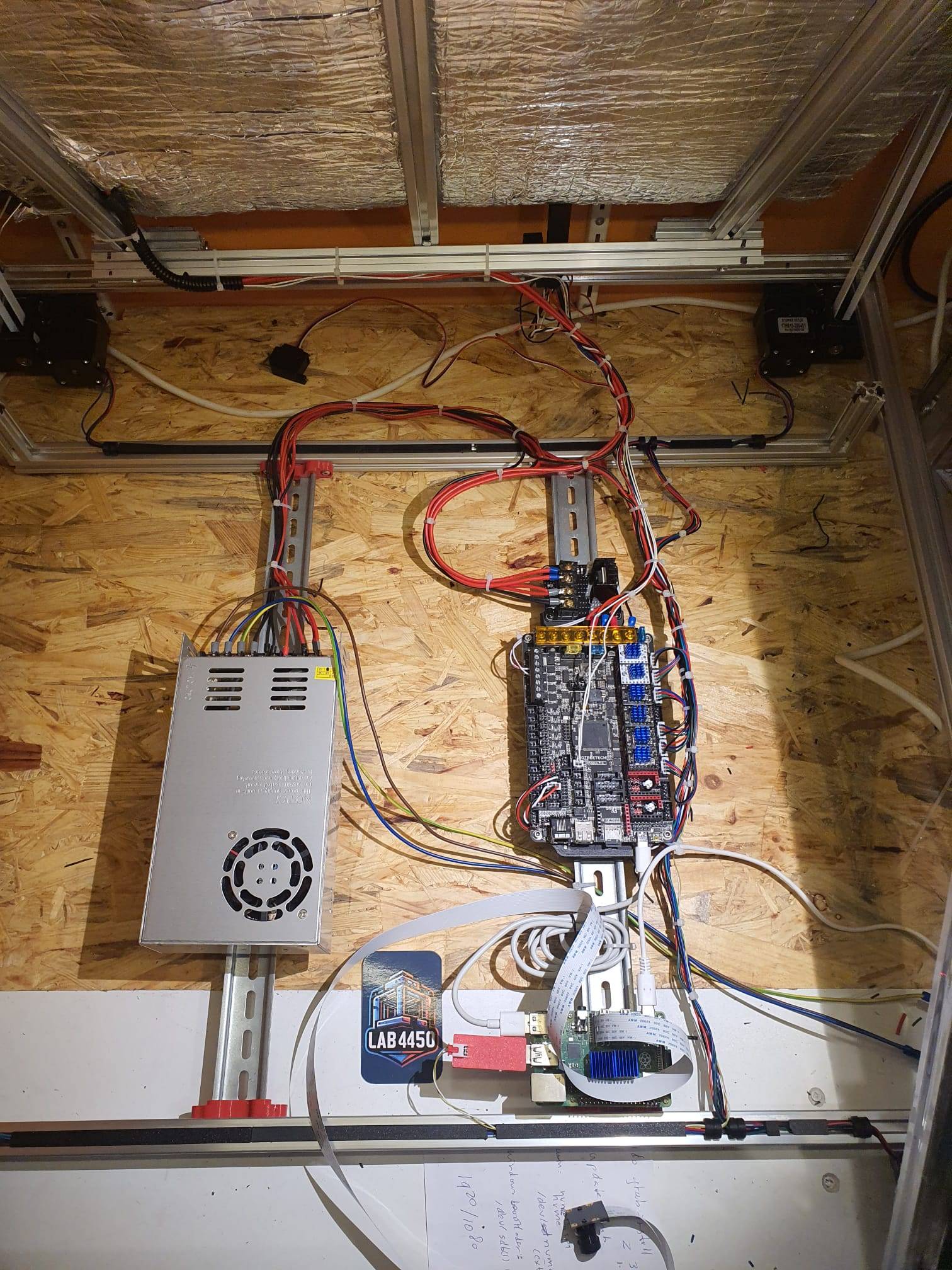
Ik wil de printer nooit omdraaien, bovendien kan dat ook helemaal niet in de beschikbare ruimte. Daarom de din-rails met beugels tussen 2 stuks 2020 in geplaatst en alle hardware van bovenaf bereikbaar, ,met scharnierend hotbed.
De klep met het 24 V 500 Watt hotbed van Tronxy er aan vast…
Kabels op lengte gemaakt, nieuwe connectoren eraan gemaakt en alles netjes gemaakt.
Ik bouw meestal mijn eigen 3d printers, voornamelijk op basis van bestaande ontwerpen.
De reden hiervoor is dat ik het gewoon leuker vind om zelf te bouwen dan kopen en gebruiken.
Ik had dus een reden om een printer te kopen die langere objecten kan printen dan 350 millimeter, waartoe ik nu beperkt ben.
UIteindelijk heb ik de Voron 600 gebouwd, maar ter info houd ik de informatie in dit artikel wel beschikbaar.
Na wat onderzoek vond ik 4 echte alternatieven.
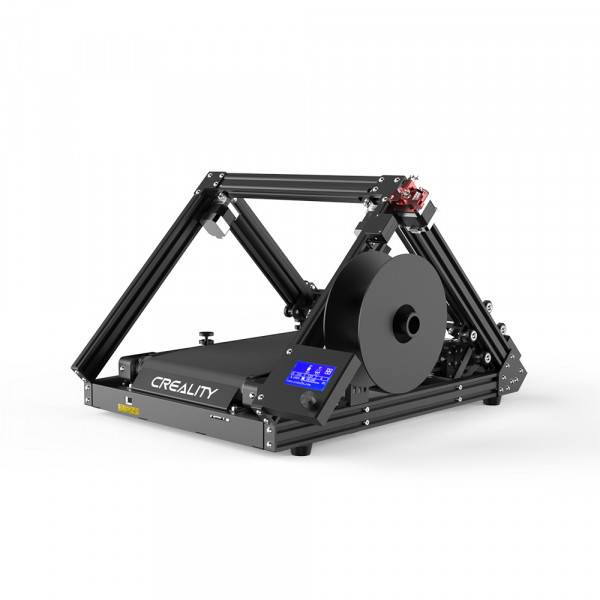
De eerste is de Creality CR-30:
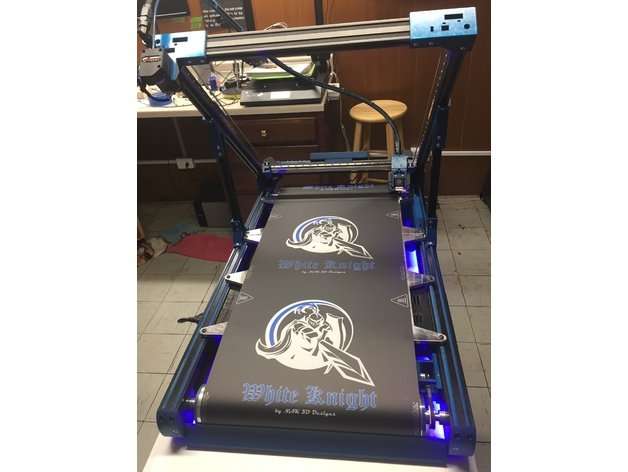
De tweede is een white knight (Zelfbouw/nabouw):
De derde is de Ideaformer IR3 V1:
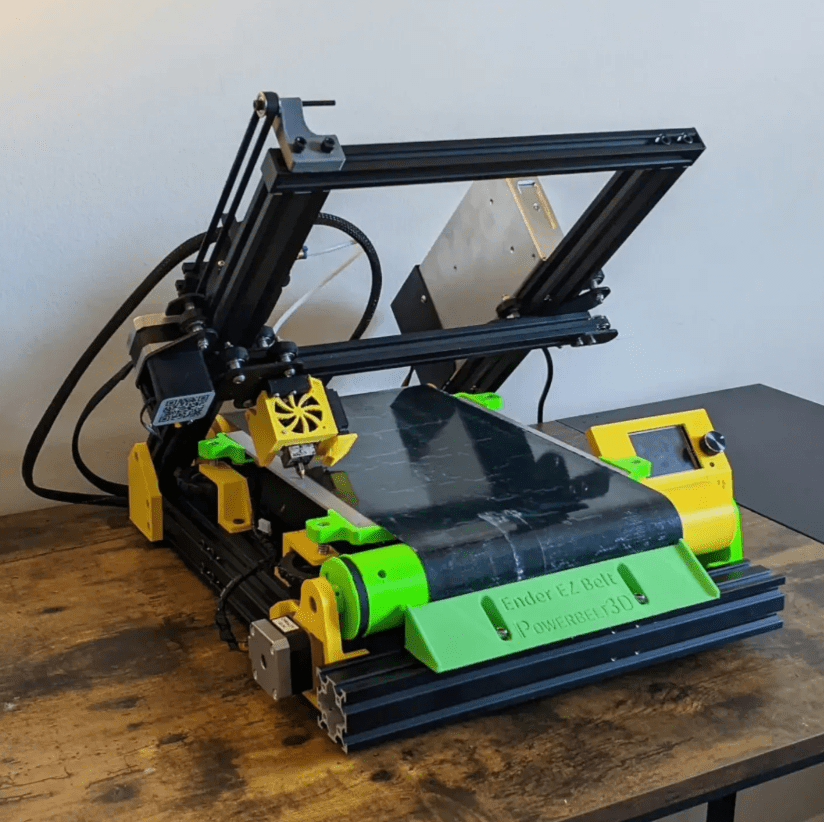
En de vierde is een ombouw van een bestaande eEnder-3, de EZ-belt ‘open source’ belt printer.
Mijn keuze is uiteindelijk op de Ideaformer gevallen vanwege de core XY structuur en de goede verkrijgbaarheid van het roterende bed, de ‘belt’.
Alle hardware zoals framedelen, X-as zijplaten, extruder, hotend, moederbord, steppers, tandwielen en -riemen, lagers, bouten en moeren heb ik voorradig..
Ik ga sowieso voor een Duet2wifi-board, omdat dit bij mij bekend is en ik de webinterface van de Duet erg prettig vind. Er zal een ESP32-camera worden toegevoegd en deze zal ook worden geïntegreerd in de webinterface van de Duet, net als bij mijn andere printers.
Aan te schaffen:
Ik zal een goede 24V PSU moeten aanschaffen, maar om te beginnen ga ik misschien voor een externe voeding van 24 Volt.
De riem en bijbehorende verwarming zijn ook al binnen via Ali, ik heb dus gekozen voor een Ideaformer riem, 320mm breed, 1,3 mm dik en een omtrek van 1180mm. Zoals ik heb gemeten is de lengte van het bed ca. 56 cm , afhankelijk van de dikte van de transportrollen. Bij de ideaformer zijn die rollen 3 inch dik, en van aluminium.
Laatste status 2024-maart: Dit project staat even on hold omdat ik de Voron 600 heb gebouwd, deze kan diagonaal erg grote objecten printen die ook behoorlijk hoog kunnen worden geprint. Ik heb wel alle spullen voor de ideaformer belt drive 3d printer beschikbaar, dus ga er bij gelegenheid wel aan beginnen!

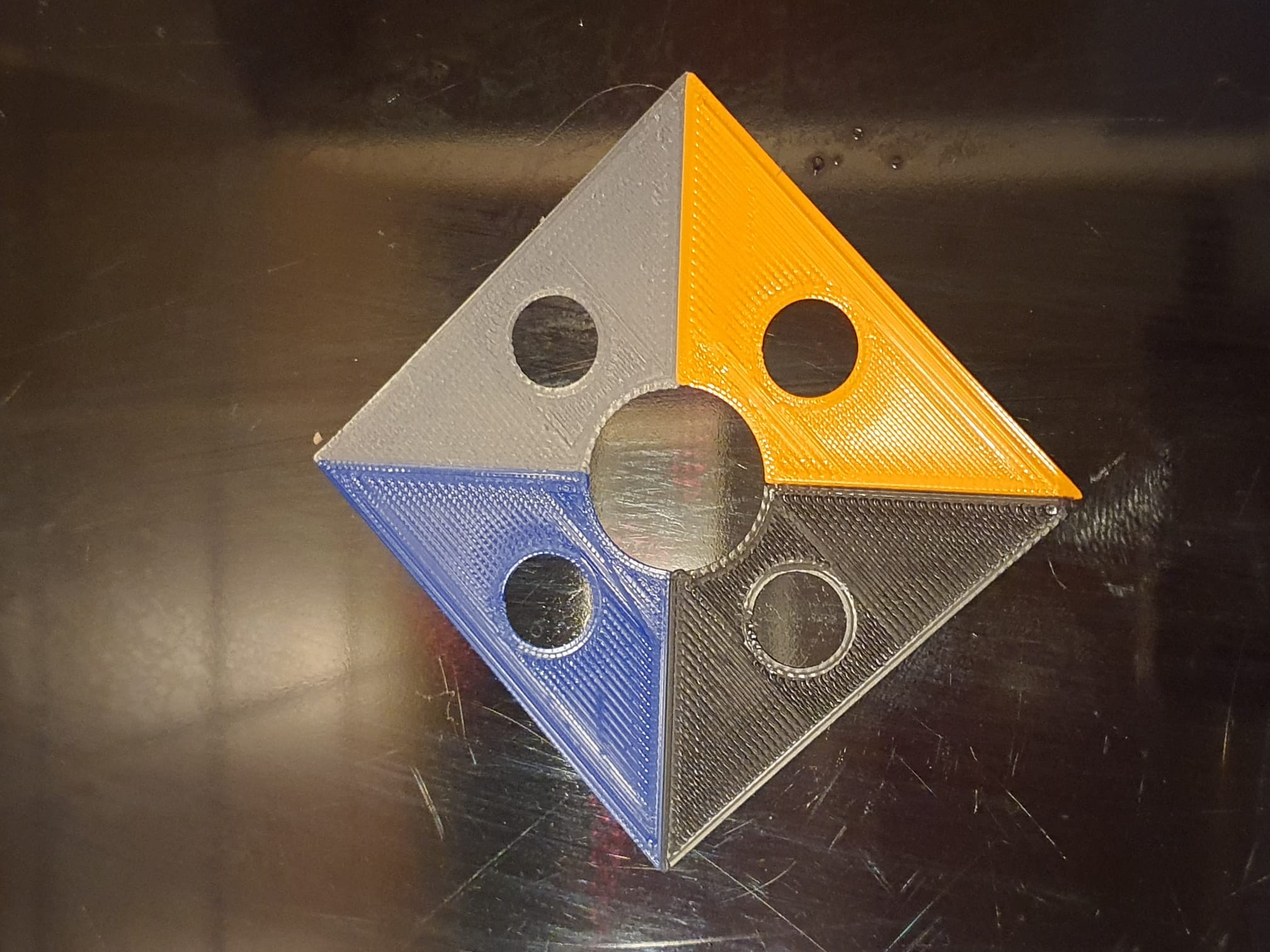
 E3D_toolchanger_first_layer_test_extruder_3_20240702V1 E3D_toolchanger_first_layer_test_extruder_2_20240702V1 E3D_toolchanger_first_layer_test_extruder_1_20240702V1 E3D_toolchanger_first_layer_test_extruder_0_20240702V1
E3D_toolchanger_first_layer_test_extruder_3_20240702V1 E3D_toolchanger_first_layer_test_extruder_2_20240702V1 E3D_toolchanger_first_layer_test_extruder_1_20240702V1 E3D_toolchanger_first_layer_test_extruder_0_20240702V1