

Poeh, dat was achteraf gezien wel veel werk.
Eerst de linker helft van de hobbykamer helemaal leeggehaald, daarna de F-rails aan de muur gemaakt. Vervolgens de vooraf op maat gezaagde ODF platen van 244×61 cm geplaatst. Daarna alles weer opnieuw ingedeeld.
Uiteindelijk heb ik alleen de 9 meest gebruikte 3d-printers geïnstalleerd, de rest heb ik voorlopig even opgeslagen. In de praktijk gebruik ik mijn delta printers nooit voor productiewerk en de KP3 printer is ook nooit meer voor productiewerk in gebruik sinds ik voor het serieuze productiewerk ook mijn 2 Prusa mini + printers heb.
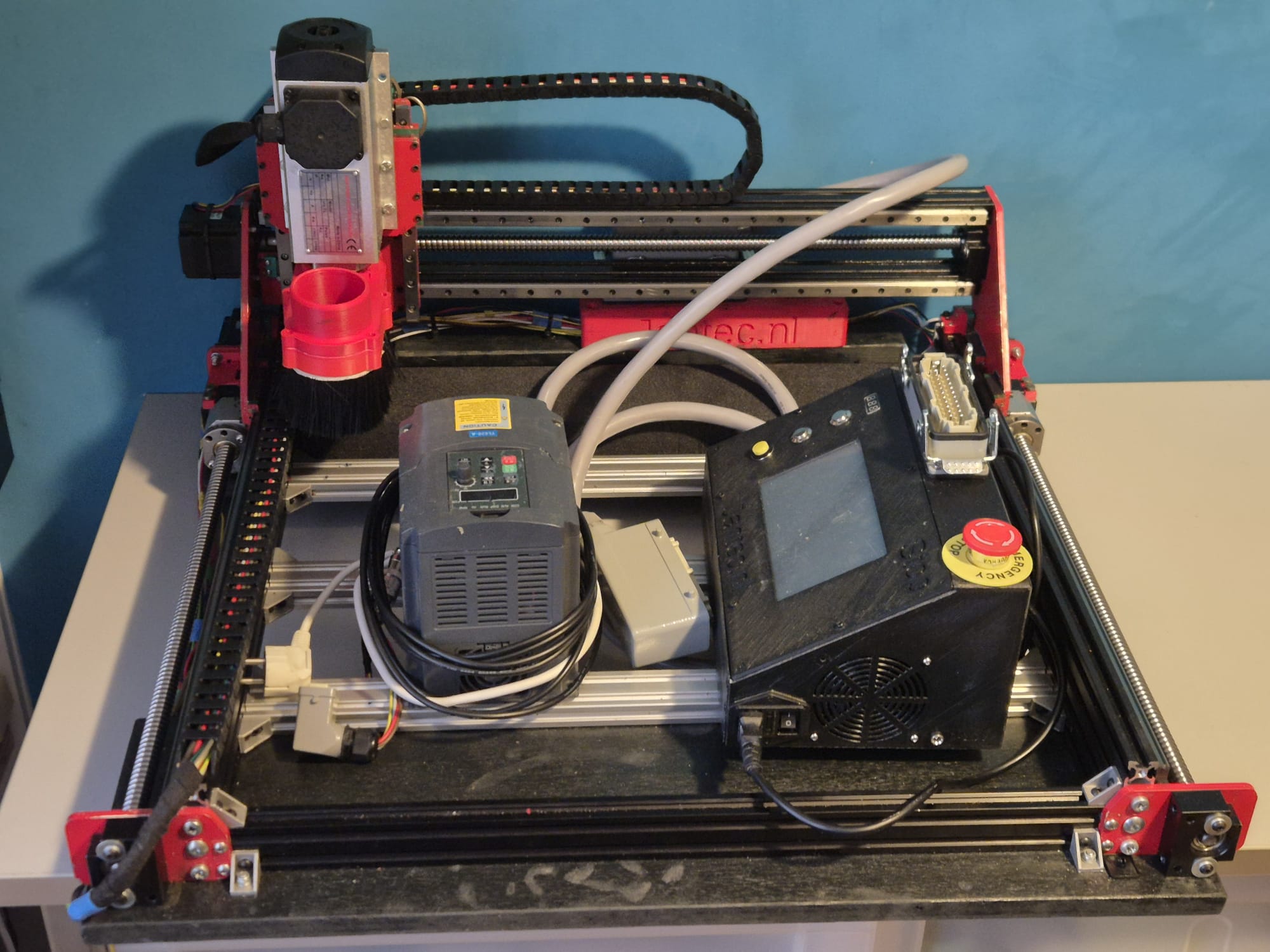
Voor de CNC- en laser graveer machines heb ik nog geen vast plekje vrij kunnen krijgen. Maar eigenlijk wil ik dat soort equipment sowieso niet binnen gebruiken. Daarom staan de grote CO2-lasercutter en de 2 grote CNC machines al in de garage. Als er werk voor is kan ik altijd de kleine CNC machine en de kleine laser graveermachines tijdelijk in de garage plaatsen.
Ook het werkplekje in de hobbykamer voor het raam is opnieuw gemaakt, en de rechterkant van de kamer is helemaal gelijkvormig gemaakt met 3 stellingrekken naast elkaar en F-rails met dragers en 40cm diepe platen ODF daarboven.
Nu kan ik lekker overzichtelijk werken. De 3d printspullen staan allemaal links en aan de rechterkant heb ik nu alle computer-gerelateerde zaken staan.
Ik heb ook een aantal Eurobakken gekocht van L60xB40xH20 voor een redelijke prijs, zodat ik zowel de 60cm diepe als de 40cm diepe ODF platen helemaal kan benutten en alles netjes kan sorteren.
























 Wees je ervan bewust dat de TOOL-instellingen voor de carriages in config.g zijn ingesteld inclusief relatieve X, Y, Z waarden voor deze build, dus zet dit NIET in je slicer!
Wees je ervan bewust dat de TOOL-instellingen voor de carriages in config.g zijn ingesteld inclusief relatieve X, Y, Z waarden voor deze build, dus zet dit NIET in je slicer!